
Abstract
Purpose
To evaluate feasibility of automatic software-based path proposals for CT-guided percutaneous biopsies.
Methods
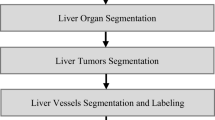
Thirty-three patients (60 \(\pm \) 12 years) referred for CT-guided biopsy of focal liver lesions were consecutively included. Pre-interventional CT and dedicated software (FraunhoferMeVis Pathfinder) were used for (semi)automatic segmentation of relevant structures. The software subsequently generated three path proposals in downward quality for CT-guided biopsy. Proposed needle paths were compared with consensus proposal of two experts (comparable, less suitable, not feasible). In case of comparable results, equivalent approach to software-based path proposal was used. Quality of segmentation process was evaluated (Likert scale, 1 \(=\) best, 6 \(=\) worst), and time for processing was registered.
Results
All biopsies were performed successfully without complications. In 91 % one of the three automatic path proposals was rated comparable to experts’ proposal. None of the first proposals was rated not feasible, and 76 % were rated comparable to the experts’ proposal. 7 % automatic path proposals were rated not feasible, all being second choice (\(n=1\)) or third choice (\(n=6\)). In 79 %, segmentation at least was good. Average total time for establishing automatic path proposal was 42 \(\pm \) 9 s.
Conclusion
Automatic software-based path proposal for CT-guided liver biopsies in the majority provides path proposals that are easy to establish and comparable to experts’ insertion trajectories.



Similar content being viewed by others


References
Sheela H, Seela S, Caldwell C, Boyer JL, Jain D (2005) Liver biopsy: evolving role in the new millennium. J Clin Gastroenterol 39:603–610
Steil S, Zerwas S, Moos G, Bittinger F, Hansen T, Mergenthaler U, Weide R (2009) CT-guided percutaneous core needle biopsy in oncology outpatients: sensitivity, specificity, complications. Onkologie 32:254–258
Schmidt AJ, Kee ST, Sze DY, Daniel BL, Razavi MK, Semba CP, Dake MD (1999) Diagnostic yield of MR-guided liver biopsies compared with CT- and US-guided liver biopsies. J Vasc Interv Radiol 10:1323–1329
Ma X, Arellano RS, Gervais DA, Hahn PF, Mueller PR, Sahani DV (2010) Success of image-guided biopsy for small (\(\le\)3 cm) focal liver lesions in cirrhotic and noncirrhotic individuals. J Vasc Interv Radiol 10:1539–1547
Wutke R, Schmid A, Fellner F, Horbach T, Kastl S, Papadopoulos T, Hohenberger W, Bautz W (2001) CT-guided percutaneous core biopsy: effective accuracy, diagnostic utility and effective costs. RoFo 173(11):1025–1033
Martino CR, Haaga JR, Bryan PJ, LiPuma JP, El Yousef SJ, Alfidi RJ (1984) CT-guided liver biopsies: eight years’ experience. Work in progress. Radiology 152(3):755–757
Haage P, Piroth W, Staatz G, Adam G, Günther RW (1999) CT-guided percutaneous biopsies for the classification of focal liver lesions: a comparison between 14 G and 18 G puncture biopsy needles. RoFo 171(1):44–48
Gupta S, Wallace MJ, Cardella JF, Kundu S, Miller DL, Rose SC (2010) Quality improvement guidelines for percutaneous needle biopsy. J Vasc Interv Radiol 21:969–975
Baegert C, Villard C, Schreck P, Soler L (2007) Multi-criteria trajectory planning for hepatic radiofrequency ablation. Med Image Comput Assist Interv 10:676–684
Seitel A, Engel M, Sommer CM, Radeleff BA, Essert-Villard C, Baegert C, Fangerau M, Fritzsche KH, Yung K, Meinzer HP, Maier-Hein L (2011) Computer-assisted trajectory planning for percutaneous needle insertions. Med Phys 38:3246–3259
Mastmeyer A, Hecht T, Fortmeier D, Handels H (2014) Ray-casting based evaluation framework for haptic force feedback during percutaneous transhepatic catheter drainage punctures. Int J Comput Assist Radiol Surg. 9(3):421–31
Wang M, Ding H, Wang X, Wang G (2015) Target visibility enhancement for C-arm cone beam CT-fluoroscopy-guided hepatic needle placement: implementation and accuracy evaluation. Int J Comput Assist Radiol Surg. 10(3):263–273
Schumann C, Bieberstein J, Trumm C, Schmidt D, Bruners P, Niethammer M, Hoffmann RT, Mahnken AH, Pereira PL, Peitgen H-O Fast automatic path proposal computation for hepatic needle placement. In: SPIE 7625, Medical imaging 2010: visualization, image-guided procedures, and modeling, 76251J
Vijayaraghavan G, Sheehan D, Zheng L, Hussain S, Ferrucci J (2011) Unusual complication after left-lobe liver biopsy for diffuse liver disease: severe bleeding from the superior epigastric artery. AJR Am J Roentgenol 197:W1135–1139
Maier-Hein L, Tekbas A, Seitel A, Pianka F, Müller SA, Satzl S, Schawo S, Radeleff B, Tetzlaff R, Franz AM, Müller-Stich BP, Wolf I, Kauczor HU, Schmied BM, Meinzer HP (2008) In vivo accuracy assessment of a needle-based navigation system for CT-guided radiofrequency ablation of the liver. Med Phys. 35(12):5385–5396
Schoth F, Plumhans C, Kraemer N, Mahnken A, Friebe M, Günther RW, Krombach G (2010) Evaluation of an interactive breath-hold control system in CT-guided lung biopsy. RoFo 182(6):507–511
Acknowledgments
The work was partially funded by a Grant of Siemens AG Healthcare Sector Imaging and IT Division Computed Tomography, Forchheim.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The following authors of this manuscript declare relationships with the following companies: Christian Schumann is employed by Fraunhofer MEVIS, Institute for Medical Image Computing, Bremen, Germany. Matthias Niethammer is employed by Siemens AG Healthcare, Forchheim, Germany. Jennifer Aumann is employed by we-do-IT, Melbourne, Australia The remaining authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Helck, A., Schumann, C., Aumann, J. et al. Automatic path proposal computation for CT-guided percutaneous liver biopsy. Int J CARS 11, 2199–2205 (2016). https://doi.org/10.1007/s11548-015-1349-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-015-1349-0