
Abstract
Purpose
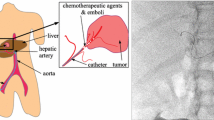
Magnetic resonance navigation (MRN), achieved with an upgraded MRI scanner, aims to guide therapeutic nanoparticles from their release in the hepatic vascular network to embolize highly vascularized liver tumors. Visualizing the catheter in real-time within the arterial network is important for selective embolization within the MR gantry. To achieve this, a new MR-compatible catheter tracking technology based on optical shape sensing is used.
Methods
This paper proposes a vessel-based registration pipeline to co-align this novel catheter tracking technology to the patient’s diagnostic MR angiography (MRA) with 3D roadmapping. The method first extracts the 3D hepatic arteries from a diagnostic MRA based on concurrent deformable models, creating a detailed representation of the patient’s internal anatomy. Once the optical shape sensing fibers, inserted in a double-lumen catheter, is guided into the hepatic arteries, the 3D centerline of the catheter is inferred and updated in real-time using strain measurements derived from fiber Bragg gratings sensors. Using both centerlines, a diffeomorphic registration based on a spectral representation of the high-level geometrical primitives is applied.
Results
Results show promise in registration accuracy in five phantom models created from stereolithography of patient-specific vascular anatomies, with maximum target registration errors below 2 mm. Furthermore, registration accuracy with the shape sensing tracking technology remains insensitive to the magnetic field of the MR magnet.
Conclusions
This study demonstrates that an accurate registration procedure of a shape sensing catheter with diagnostic imaging is feasible.






Similar content being viewed by others


References
Badoual A, Gerard M, de Leener B, Abi-Jaoudeh N, Kadoury S (2016) 3D Vascular path planning of chemo-embolizations using segmented hepatic arteries from MR angiography. In: Proceedings of ISBI, 2016
De Leener B, Cohen-Adad J, Kadoury S (2015) Automatic segmentation of the spinal cord and spinal canal coupled with vertebral labeling. IEEE Trans Med Imaging 34:1705–1718
Elayaperumal S, Plata J, Holbrook A, Park YL, Pauly K, Daniel B, Cutkosky M (2014) Autonomous real-time interventional scan plane control with a 3-D shape-sensing needle. IEEE Trans Med Imaging 33:2128–2139
van der Heiden MS, Henken KR, Chen LK, van den Bosch BG, van den Braber R, Dankelman J, van den Dobbelsteen J (2012) Accurate and efficient fiber optical shape sensor for MRI compatible minimally invasive instruments. In: Proceedings of SPIE optical systems design, p 85500
Kauffmann C, Douane F, Therasse E, Lessard S, Elkouri S, Gilbert P, Beaudoin N, Pfister M, Blair J, Soulez G (2015) Source of errors and accuracy of a two-dimensional/three-dimensional fusion road map for endovascular aneurysm repair of abdominal aortic aneurysm. J Vasc Interv Radiol 26:544–551
Liu H, Farvardin A, Grupp R, Murphy R, Taylor R, Iordachita I, Armand M (2015) Shape tracking of a dexterous continuum manipulator utilizing two large deflection shape sensors. Sens J IEEE 15(10):5494–5503
Lombaert H, Grady L, Polimeni JR, Cheriet F (2013) FOCUSR: feature oriented correspondence using spectral regularization-a method for precise surface matching. IEEE Trans Pattern Anal Mach Intell 35:2143–2160
Lombaert H, Sporring J, Siddiqi K (2013) Diffeomorphic spectral matching of cortical surfaces. In: Information processing in medical imaging, pp 376–389
Mandal K, Parent F, Martel S, Kashyap R, Kadoury S (2015) Calibration of a needle tracking device with fiber Bragg grating sensors. In: Proceedings of SPIE medical imaging, vol. 9415
Marelli L, Stigliano R, Triantos C, Senzolo M, Cholongitas E, Davies N, Yu D, Meyer T, Patch D, Burroughs A (2006) Treatment outcomes for hepatocellular carcinoma using chemoembolization in combination with other therapies. Cancer Treat Rev 32:594–606
Martel S, Mathieu JB, Felfoul O, Chanu A, Aboussouan E, Tamaz S, Pouponneau P, Yahia L, Beaudoin G, Soulez G, Mankiewicz M (2008) A computer-assisted protocol for endovascular target interventions using a clinical MRI system for controlling untethered microdevices and future nanorobots. Comput Aided Surg 13:340–352
Mathieu JB, Martel S (2007) Magnetic microparticle steering within the constraints of an MRI system: proof of concept of a novel targeting approach. Biomed Microdev 9:801–808
Mitrovic U, Spiclin Z, Likar B, Pernus F (2013) 3D–2D registration of cerebral angiograms: a method and evaluation on clinical images. IEEE Trans Med Imaging 32:1550–1563
Myronenko A, Song X, Miguel AC (2009) Non-rigid point set registration: coherent point drift. IEEE Trans Pattern Anal Mach Intell 32:2262–2275
Park YL, Elayaperumal S, Daniel B, Ryu SC, Shin M, Savall J, Black R, Moslehi B, Cutkosky M (2010) Real-time estimation of 3-D needle shape and deflection for MRI-guided interventions. IEEE/ASME Trans Mechatron 15:906–915
Roesthuis R, Kemp M, van den Dobbelsteen J, Misra S (2014) Three-dimensional needle shape reconstruction using an array of fiber Bragg grating sensors. IEEE/ASME Trans Mechatron 19:1115–1126
Siegel R, Naishadham D, Jemal A (2012) Cancer statistics. CA: Cancer J Clin 62:10–29
Tabatabaei SN, Duchemin S, Girouard H, Martel S (2012) Towards MR-navigable nanorobotic carriers for drug delivery into the brain. In: Proceedings of IEEE international conference robotics and automation, pp 727–732
Velut J, Toumoulin C, Coatrieux J (2010) 3D coronary structure tracking algorithm with regularization and multiple hypotheses in MRI. In: Proceedings of ISBI, pp 37–40
Wilson E, Yaniv Z, Lindisch D, Cleary K (2008) A buyers guide to electromagnetic tracking systems for clinical applications. In: Proceedings of SPIE, pp 182B–69
Acknowledgments
This study was funded by the Canada Research Chairs (950-228359), the Canadian Institutes of Health Research (CIHR) (MOP142401) and the Fonds de Recherche du Quebec en Science et Technologies (FRQNT) scholarship program (142873).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interests.
Ethical approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards.
Informed consent
For this type of study formal consent was not required.
Rights and permissions
About this article

Cite this article
Mandal, K., Parent, F., Martel, S. et al. Vessel-based registration of an optical shape sensing catheter for MR navigation. Int J CARS 11, 1025–1034 (2016). https://doi.org/10.1007/s11548-016-1366-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-016-1366-7