
Abstract
Purpose
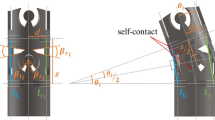
The use of a robot-guided laser osteotome for median sternotomy is impeded by prohibiting cutting inaccuracies due to respiration-induced motions of the thorax. With this paper, we advance today’s methodologies in sternotomy procedures by introducing the concept of novel 3D functional cuts and a respiratory motion compensation algorithm for the computer-assisted and robot-guided laser osteotome, CARLO®.
Methods
We present a trajectory planning algorithm for performing 3D functional cuts at a constant cutting velocity. In addition, we propose the use of Gaussian process (GP) prediction in order to anticipate the sternum’s pose providing enough time for the CARLO® device to adjust the position of the laser source.
Results
We analysed the performance of the proposed algorithms on a computer-based simulation framework of the CARLO® device. The median position error of the laser focal point has shown to be reduced from 0.22 mm without GP prediction to 0.19 mm with GP prediction.
Conclusion
The encouraging simulation results support the proposed respiratory motion compensation algorithm for robot-guided laser osteotomy on the thorax. Successful compensation of the respiration-induced motion of the thorax opens doors for robot-guided laser sternotomy and the related novel cutting patterns. These functional cuts hold great potential to significantly improve postoperative sternal stability and therefore reduce pain and recovery time for the patient. By enabling functional cuts, we approach an important threshold moment in the history of osteotomy, creating innovative opportunities which reach far beyond the classic linear cutting patterns.







Similar content being viewed by others

References
Baek KW, Deibel W, Marinov D, Griessen M, Bruno A, Zeilhofer HF, Cattin P, Juergens P (2015) Clinical applicability of robot-guided contact-free laser osteotomy in cranio-maxillo-facial surgery: in-vitro simulation and in-vivo surgery in minipig mandibles. Br J Oral Max Surg 53(10):976–981
Baek KW, Deibel W, Marinov D, Griessen M, Dard M, Bruno A, Zeilhofer HF, Cattin P, Juergens P (2015) A comparative investigation of bone surface after cutting with mechanical tools and Er:YAG laser. Laser Surg Med 47(5):426–432
Busack M, Morel G, Bellot D (2010) Breathing motion compensation for robot assisted laser osteotomy. In: IEEE international conference on robot, pp 4573–4578
Deibel W, Schneider A, Augello M, Bruno AE, Juergens P, Cattin P (2015) A compact, efficient, and lightweight laser head for CARLO: integration, performance, and benefits. In: SPIE optical engineering and applications, vol 9579, pp 957905–957905-10
Dürichen R, Wissel T, Ernst F, Schweikard A (2013) Respiratory motion compensation with relevance vector machines. In: International conference on medical image computing and computer-assisted intervention. Springer, pp 108–115
Dürichen R, Fang X, Wissel T, Schweikard A (2014) Gaussian process models for respiratory motion compensation. In: Proceedings of the 28th international congress and exhibition on computer assisted radiology and surgery (CARS’14), Fukuoka, pp 286–287
Ernst F, Schweikard A (2009) Forecasting respiratory motion with accurate online support vector regression (svrpred). Int J Comput Assist Radiol Surg 4(5):439–447
Ernst F, Schlaefer A, Schweikard A (2007) Prediction of respiratory motion with wavelet-based multiscale autoregression. In: International conference on medical image computing and computer-assisted intervention (MICCAI), pp 668–675
Ernst F, Schlaefer A, Dieterich S, Schweikard A (2008) A fast lane approach to LMS prediction of respiratory motion signals. Biomed Signal Process 3(4):291–299
Ernst F, Dürichen R, Schlaefer A, Schweikard A (2013) Evaluating and comparing algorithms for respiratory motion prediction. Phys Med Biol 58(11):3911
Fawzy H, Alhodaib N, Mazer CD, Harrington A, Latter D, Bonneau D, Errett L, Mahoney J (2009) Sternal plating for primary and secondary sternal closure; can it improve sternal stability. J Cardiothorac Surg 4:19
Gangloff J, Ginhoux R, De Mathelin M, Soler L, Marescaux J (2006) Model predictive control for compensation of cyclic organ motions in teleoperated laparoscopic surgery. IEEE Trans Control Syst Technol 14(2):235–246
Ginhoux R, Gangloff J, De Mathelin M, Soler L, Sanchez MMA, Marescaux J (2005) Active filtering of physiological motion in robotized surgery using predictive control. IEEE Trans Robot 21(1):67–79
Jud C, Preiswerk F, Cattin PC (2015) Respiratory motion compensation with topology independent surrogates. In: Workshop on imaging and computer assistance in radiation therapy
Kuhlemann I, Schweikard A, Jauer P, Ernst F (2016) Robust inverse kinematics by configuration control for redundant manipulators with seven DoF. In: 2016 2nd international conference on control, automation and robotics (ICCAR). IEEE, pp 49–55
Levin LS (2001) Methods of closing a patient’s sternum following median sternotomy. US patent 6,217,580
Mall G, Sprinzl G, Koebke J (1991) Clinical morphology of the sternum. Biomed Tech Biomed Eng 36(11):288–289
Murphy MJ, Dieterich S (2006) Comparative performance of linear and nonlinear neural networks to predict irregular breathing. Phys Med Biol 51(22):5903
Nakamura Y, Kishi K, Kawakami H (2001) Heartbeat synchronization for robotic cardiac surgery. IEEE Int Conf Robot 2:2014–2019
Ortmaier T, Gröger M, Boehm DH, Falk V, Hirzinger G (2005) Motion estimation in beating heart surgery. IEEE Trans Biomed Eng 52(10):1729–1740
Pfeiffer F, Glocker C (1996) Multibody dynamics with unilateral contacts, vol 9. Wiley, New York
Preiswerk F, De Luca V, Arnold P, Celicanin Z, Petrusca L, Tanner C, Bieri O, Salomir R, Cattin PC (2014) Model-guided respiratory organ motion prediction of the liver from 2D ultrasound. Med Image Anal 18(5):740–751
Ramrath L, Schlaefer A, Ernst F, Dieterich S, Schweikard A (2007) Prediction of respiratory motion with a multi-frequency based extended Kalman filter. In: Proceedings of 21st international conference and exhibition on computer assisted radiology and surgery (CARS’07), vol 21
Rasmussen CE, Williams CKI (2006) Gaussian processes for machine learning. The MIT Press, Cambridge
Robicsek F, Fokin A, Cook J, Bhatia D (2000) Sternal instability after midline sternotomy. Thorac Cardiov Surg 48(1):1–8
Sadeghian H, Villani L, Keshmiri M, Siciliano B (2014) Task-space control of robot manipulators with null-space compliance. IEEE Trans Robot 30(2):493–506
Siciliano B, Sciavicco L, Villani L, Oriolo G (2010) Robotics: modelling, planning and control. Springer, New York
Vedam SS, Keall PJ, Docef A, Todor DA, Kini VR, Mohan R (2004) Predicting respiratory motion for four-dimensional radiotherapy. Med Phys 31(8):2274–2283
Walz G (2003) Lexikon der Mathematik: in sechs Bänden. Spektrum Akademischer Verlag, Heidelberg
Acknowledgements
The authors would like to thank all persons who voluntarily participated in this study. Furthermore, we wish to express our gratitude to the employees of AOT for their technical and advisory support.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
Alina Giger and Christoph Jud declare that they have no conflict of interest. Philippe Cattin is a founder of AOT.
Ethical approval
For this type of study, formal consent is not required.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Rights and permissions
About this article

Cite this article
Giger, A., Jud, C. & Cattin, P.C. Respiratory motion compensation for the robot-guided laser osteotome. Int J CARS 12, 1751–1762 (2017). https://doi.org/10.1007/s11548-017-1543-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-017-1543-3