
Abstract
Purpose
The development of surgery is to be minimally invasive and collaborative with robot systems, which has caught increasing attention in recent years. However, the narrow access routes and confined working spaces in vivo usually make distal end-effectors of surgical systems not easy to operate. To overcome this problem, a novel cable-driven distal end-effector mechanism designed for single-port robotic surgery was proposed.
Methods
A cable-driven joint structure and the corresponding methods of threading cables were proposed which can maintain the length and even the tension force of cables constant during operation. Based on the proposed joint structure, the cable-driven distal end-effector mechanism consists of a parallelogram mechanism and a snake mechanism. The parallelogram mechanism is used to enlarge its reachable workspace through establishing the triangulation of operation. The snake mechanism is used to achieve the expected pose through providing sufficient bending degrees of freedom. All of the degrees of freedom can be decoupled at the expense of a slightly more tedious process of threading cables.
Results
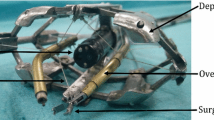
The primary prototype and its miniature assembled and threaded manually performed as expected regardless of bend, translation and their combination. But the inadequate tension force of cables and assembly errors affect the load capacity and accuracy, which need to be improved by automatic assembly.
Conclusion
A cable-driven distal end-effector mechanism composed of a parallelogram mechanism, and a snake mechanism used for single-port robotic surgery was proposed. The mechanism adopts a novel cable-driven joint structure and corresponding methods of threading cables to keep the length and even the tension force of cables constant during surgery.













Similar content being viewed by others


Change history
09 March 2021
A Correction to this paper has been published: https://doi.org/10.1007/s11548-021-02331-2
References
Mullins RJ (2007) Shock, electrolytes and fluid. In: Townsend CM, Beauchamp RD, Evers BM, Mattox KL (eds) Sabiston textbook of surgery: the biological basis of modern surgical practice. 18th edn, Saunders Elsevier, Philadelphia, pp 69–112
Pędziwiatr M, Małczak P, Pisarska M, Major P, Wysocki M, Stefura T, Budzyński A (2017) Minimally invasive versus open pancreatoduodenectomy—systematic review and meta-analysis. Langenbeck’s Arch Surg 402(5):841–851
Luketich JD, Pennathur A, Awais O, Levy RM, Keeley S, Shende M, Schuchert MJ (2012) Outcomes after minimally invasive esophagectomy: review of over 1000 patients. Ann Surg 256(1):95
Liao CH, Wu YT, Liu YY, Wang SY, Kang SC, Yeh CN, Yeh TS (2016) Systemic review of the feasibility and advantage of minimally invasive pancreaticoduodenectomy. World J Surg 40(5):1218–1225
Parisi A, Reim D, Borghi F, Nguyen NT, Qi F, Coratti A, Gagnière J (2017) Minimally invasive surgery for gastric cancer: a comparison between robotic, laparoscopic and open surgery. World J Gastroenterol 23(13):2376
Antoniou SA, Antoniou GA, Antoniou AI, Granderath FA (2015) Past, present, and future of minimally invasive abdominal surgery. JSLS: J Soc Laparoendoscopic Surg 19(3)
Romanelli JR, Earle DB (2009) Single-port laparoscopic surgery: an overview. Surg Endosc 23(7):1419–1427
Cianci S, Rosati A, Rumolo V, Alletti SG, Gallotta V, Turco LC, Scambia G (2019) Robotic single-port platform in general, urologic, and gynecologic surgeries: a systematic review of the literature and meta-analysis. World J Surg 43(10):2401–2419
Evers L, Bouvy N, Branje D, Peeters A (2017) Single-incision laparoscopic cholecystectomy versus conventional four-port laparoscopic cholecystectomy: a systematic review and meta-analysis. Surg Endosc 31(9):3437–3448
Antoniou SA, Morales-Conde S, Antoniou GA, Granderath FA, Berrevoet F, Muysoms FE (2016) Single-incision laparoscopic surgery through the umbilicus is associated with a higher incidence of trocar-site hernia than conventional laparoscopy: a meta-analysis of randomized controlled trials. Hernia 20(1):1–10
Antoniou SA, García-Alamino JM, Hajibandeh S, Hajibandeh S, Weitzendorfer M, Muysoms FE, Gioumidou M (2018) Single-incision surgery trocar-site hernia: an updated systematic review meta-analysis with trial sequential analysis by the Minimally invasive surgery synthesis of interventions outcomes network (MISSION). Surg Endosc 32(1):14–23
Samarasekera D, Kaouk JH (2014) Robotic single port surgery: Current status and future considerations. Indian J Urol IJU J Urol Soc India 30(3):326
Nelson RJ, Chavali JSS, Yerram N, Babbar P, Kaouk JH (2017) Current status of robotic single-port surgery. Urol Ann 9(3):217
Morelli L, Guadagni S, Di Franco G, Palmeri M, Di Candio G, Mosca F (2016) Da Vinci single site© surgical platform in clinical practice: a systematic review. Int J Med Rob Comp Assist Surg 12(4):724–734
Kaouk JH, Haber GP, Autorino R, Crouzet S, Ouzzane A, Flamand V, Villers A (2014) A novel robotic system for single-port urologic surgery: first clinical investigation. Eur Urol 66(6):1033–1043
Marks JH, Salem JF, Anderson BK, Josse JM, Schoonyoung HP (2020) Single-port robotic left colectomy: first clinical experience using the SP robot (rSILS). Tech Coloproctol 24(1):57–63
Piccigallo M, Scarfogliero U, Quaglia C, Petroni G, Valdastri P, Menciassi A, Dario P (2010) Design of a novel bimanual robotic system for single-port laparoscopy. IEEE/ASME Trans Mechatron 15(6):871–878
Petroni G, Niccolini M, Caccavaro S, Quaglia C, Menciassi A, Schostek S, Dario P (2013) A novel robotic system for single-port laparoscopic surgery: preliminary experience. Surg Endosc 27(6):1932–1937
Shang, J., Noonan, D. P., Payne, C., Clark, J., Sodergren, M. H., Darzi, A., & Yang, G. Z. (2011, May). An articulated universal joint based flexible access robot for minimally invasive surgery. In: 2011 IEEE international conference on robotics and automation (pp. 1147–1152). IEEE.
Xu K, Simaan N (2010) Intrinsic wrench estimation and its performance index for multisegment continuum robots. IEEE Trans Rob 26(3):555–561
Ding J, Goldman RE, Xu K, Allen PK, Fowler DL, Simaan N (2012) Design and coordination kinematics of an insertable robotic effectors platform for single-port access surgery. IEEE/ASME Trans Mechatron 18(5):1612–1624
Xu K, Zhao J, Fu M (2014) Development of the SJTU unfoldable robotic system (SURS) for single port laparoscopy. IEEE/ASME Trans Mechatron 20(5):2133–2145
Xu, K., Dai, Z., Zhao, J., & Mei, W. (2015, July). Dexterity and functionality enhancement of the SJTU Unfoldable Robotic System. In: 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM) (pp. 151–157). IEEE.
Webster RJ III, Romano JM, Cowan NJ (2008) Mechanics of precurved-tube continuum robots. IEEE Trans Rob 25(1):67–78
Lock, J., Laing, G., Mahvash, M., & Dupont, P. E. (2010, October). Quasistatic modeling of concentric tube robots with external loads. In: 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 2325–2332). IEEE.
Shang, J., Payne, C. J., Clark, J., Noonan, D. P., Kwok, K. W., Darzi, A., & Yang, G. Z. (2012, October). Design of a multitasking robotic platform with flexible arms and articulated head for minimally invasive surgery. In: 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 1988–1993). IEEE.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Human and animal rights
This article does not contain any studies with animals performed by any of the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
ESM1 (MP4 12754 kb)
ESM2 (MP4 8265 kb)
ESM3 (MP4 5894 kb)
ESM4 (MP4 6748 kb)
ESM5 (MP4 4322 kb)
Rights and permissions
About this article

Cite this article
Wang, Y., Cao, Q., Zhu, X. et al. A cable-driven distal end-effector mechanism for single-port robotic surgery. Int J CARS 16, 301–309 (2021). https://doi.org/10.1007/s11548-020-02290-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-020-02290-0