
Abstract
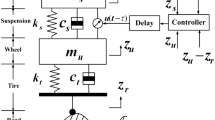
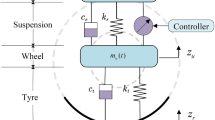
This paper focuses on the fuzzy guaranteed cost \(H\infty\) control problem for uncertain nonlinear vehicle active suspension system with random actuator time delay. Its main contribution to the literature is that a fuzzy guaranteed cost \(H\infty\) controller (FGCHC) is proposed to ensure the resulting closed-loop vehicle active suspension system to be asymptotically stable and guarantee the performance index to be less than a preset upper bound. More specifically, taking the varying masses and the uncertainties caused by random actuator delay into consideration, a discrete-time Takagi-Sugeno fuzzy model for vehicle active suspension is obtained based on an augmented vector, which is without explicit of random actuator delay. By employing the Lyapunov stability theory and the linear matrix inequality (LMI) approach, the existence condition and the design approach for proposed FGCHC are presented. Meanwhile, the computability for proposed FGCHC is guaranteed by solving a corresponding convex optimization problem. By analyzing performance requirements for vehicle active suspension under different simulation scenarios, simulation results demonstrate that the proposed FGCHC can offset the vibration and compensate the varying masses and uncertainties for vehicle active suspension effectively.






Similar content being viewed by others

References
Tseng, H.E., Hrovat, D.: State of the art survey: active and semi-active suspension control. Veh. Syst. Dynam. 53, 1034–1062 (2015)
Sun, W., Pan, H., Zhang, Y., Gao, H.: Multi-objective control for uncertain nonlinear active suspension systems. Mechatronics 24, 318–327 (2014)
Huang, Y., Nan, J., Wu, X., Gao, G.: Approximation-free control for vehicle active suspensions with hydraulic actuator. IEEE Trans. Ind. Elect. (2018). https://doi.org/10.1109/TIE.2018.2798564
Lian, R.-J.: Enhance adaptive self-organizing fuzzy sliding-mode controller for active suspension systems. IEEE Trans. Ind. Elect. 60, 958–968 (2013)
Nan, J., Huang, Y., Wu, X., Su, S.-F., Li, G.: Adaptive finite-time fuzzy control of nonlinear active suspension systems with input delay. IEEE Trans. Cyber. (2019). https://doi.org/10.1109/TCYB.2019.2894724
Chen, C.L.P., Zhang, T., Chen, L., Tam, S.C.: I-Ching divination evolutionary algorithm and its convergence analysis. IEEE Trans. Cyber. 47(1), 2–13 (2017)
Han, S.-Y., Zhang, C.-H., Tang, G.-Y.: Approximation optimal vibration for networked nonlinear vehicle active suspension with actuator time delay. Asian J. Control 19, 983–995 (2017)
Zhang, T., Su, G., Qing, C., Xu, X., Cai, B., Xing, X.: Hierarchical Lifelong Learning by Sharing Representations and Integrating Hypothesis. IEEE Trans. Syst. Man Cyber. Syst. (2018). https://doi.org/10.1109/TSMC.2018.2884996
Han, S.-Y., Tang, G.-Y., Chen, Y.-H., Yang, X.-X., Yang, X.: Optimal vibration control for vehicle active suspension discrete-time systems with actuator time delay. Asian J. Control 15(6), 1579–1588 (2013)
Zhang, T., Chen, C.L.P., Chen, L., Xu, X., Hu, B.: Design of highly nonlinear substitution boxes based on I-Ching operators. IEEE Trans. Cyber. 48(12), 3349–3358 (2018)
Li, H., Jing, X., Lam, H., Shi, P.: Fuzzy sampled-data control for uncertain vehicle suspension systems. IEEE Trans. Cyber. 44(7), 1111–1126 (2014)
Wang, G., Chadli, M., Chen, H., Zhou, Z.: Event-triggered control for active vehicle suspension systems with network-induced delays. J. Frank. Instit. Eng. Appl. Math. 356(1), 147–172 (2019)
Meng, Q., Qian, C., Liu, R.: Dual-rate sampled-data stabilization for active suspension system of electric vehicle. Int J Robust Nonlinear Control 28(5), 1610–1623 (2018)
Cao, J., Li, P., Liu, H.: An interval fuzzy controller for vehicle active suspension systems. IEEE Trans Intell Transp. Syst. 11(4), 885–895 (2010)
Du, H., Zhang, N.: Fuzzy control for nonlinear uncertain electrohydraulic active suspensions with input constraint. IEEE Trans. Fuzzy Syst. 17(2), 343–356 (2009)
Li, H., Yu, J., Hilton, C., Liu, H.: Fuzzy control for uncertain vehicle active suspension systems via dynamic sliding-mode approach. IEEE Trans. Syst. Man Cyber. Syst. 47(1), 24–32 (2017)
Li, H., Zhang, Z., Yan, H., Xie, X.: Adaptive event-triggered fuzzy control for uncertain active suspension systems. IEEE Trans. Cyber. (2018). https://doi.org/10.1109/TCYB.2018.2864776
Zhong, X.-F., Han, S.-Y., Zhou, J., Chen, Y.-H.: Design of optimal disturbance attenuation controller for networked T-S fuzzy vehicle active suspension with control delay. Int. J. Fuzzy Syst. 21(2), 676–684 (2019)
Cao, J., Liu, H., Li, P., Brown, D.J.: State of the art in vehicle active suspension adaptive control systems based on intelligent methodologies. IEEE Trans. Intell. Transp. Syst. 9(3), 392–405 (2008)
Du, H., Zhang, N.: \(H_\infty\) control of active vehicle suspensions with actuator time delay. J. Sound Vibr. 301, 236–252 (2007)
Ngwangwa, H.M., Heyns, P.S.: Application of an ANN-based methodology for road surface condition identification on mining vehicles and roads. J. Terramech. 53, 59–74 (2014)
Xiao, Z., Jing, X.: Frequency-domain analysis and design of linear feedback of nonlinear systems and applications in vehicle suspensions. IEEE/ASME Trans. Mech. 21, 506–517 (2016)
Han, S.-Y., Chen, Y.-H., Tang, G.-Y.: Fault diagnosis and fault-tolerant tracking control for discrete-time systems with faults and delays in actuator and measurement. J. Frank. Inst. Eng. Appl. Math. 354(12), 4719–4738 (2017)
Pang, H., Zhang, X., Xu, Z.: Adaptive backstepping-based tracking control design for nonlinear active suspension system with parameter uncertainties and safety constraints. ISA Trans. (2018). https://doi.org/10.1016/j.isatra.2018.11.047
Soliman, H.M., Bajabaa, N.S.: Robust guaranteed-cost control with regional pole placement of active suspensions. J. Vibr. Control 19(8), 1170–1186 (2013)
Moradi, S.M., Akbari, A., Mizaei, M.: An offline LMI-based robust model predictive control of vehicle active suspension system with parameter uncertainty. Trans. Inst. Measu. Control 41(6), 1699–1711 (2019)
Ji, H.H., Zhang, H., Cui, B.T.: Finite-dimensional guaranteed cost sampled-data fuzzy control of Markov jump distributed parameter systems via T-S fuzzy model. IET Control Theory Appl. 12(15), 2098–2108 (2018)
Ye, D., Song, T.T.: Decentralized reliable guaranteed cost control for large-scale nonlinear systems using actor-critic network. Neurocomputing 320, 121–128 (2018)
Acknowledgements
This work is supported by the Shandong Provincial Natural Science Foundation (ZR2017MF044, ZR2019MF040), the Shandong Province Key Research and Development Program (2018GGX101016, 2018GGX101048), the Shandong Province Higher Educational Science and Technology Program (J17KA047, J16LN07, J16LB06), the National Natural Science Foundation of China (U1864205, 61873324, 61573166, 61872419), and the Fostering High-Level Research Projects Foundation of Shandong Women’s University (2019GSPSJ07).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Han, SY., Zhong, XF., Chen, YH. et al. Fuzzy Guaranteed Cost \(H\infty\) Control of Uncertain Nonlinear Fuzzy Vehicle Active Suspension with Random Actuator Delay. Int. J. Fuzzy Syst. 21, 2021–2031 (2019). https://doi.org/10.1007/s40815-019-00700-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-019-00700-3