
Abstract
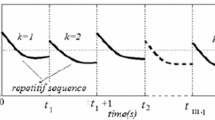
In this paper, discrete-time linear systems with parameter switching in the repetitive mode are considered. A new iterative learning control design method is proposed. This method is based on the construction of an auxiliary 2D model in the form of a discrete repetitive process; the stability of the auxiliary model guarantees the convergence of the learning process. Stability conditions are derived using the divergent method of Lyapunov vector functions. The concept of the average dwell time in pass direction is introduced. An example that demonstrates the capabilities and features of the new method is presented.



Similar content being viewed by others
References
Liberzon, D. Switching in Systems and Control. (Birkhäuser, Boston, 2003).
Shorten, R., Wirth, F., Mason, O., Wulff, K. & King, C. Stability Criteria for Switched and Hybrid Systems. SIAM Rev. 49, 545–592 (2007).
Lin, H. & Antsaklis, P. J. Stability and Stabilizability of Switched Linear Systems: A Survey of Recent Results. IEEE Trans. Autom. Control 54, 308–321 (2009).
Sun, Z. & Ge, S. S. Stability Theory of Switched Dynamical Systems. (Springer-Verlag, London, 2011).
Alwan, M. S. & Liu, X. Theory of Hybrid Systems: Deterministic and Stochastic. (Springer Nature Singapore, Singapore, 2018).
Rogers, E., Gałkowski, K. & Owens, D. H. Control Systems Theory and Applications for Linear Repetitive Processes. Lecture Notes in Control and Information Sciences 349 (Springer-Verlag, Berlin, 2007).
Arimoto, S., Kawamura, S. & Miyazaki, F. Bettering Operation of Robots by Learning. J. Robotic Syst. 1(no. 2), 123–140 (1984).
Bolder, J. and Oomen, T., Iterative Learning Control: A 2D System Approach, Automatica, 2016, vol. 71, pp. 247–253.
Hladowski, L., Gałkowski, K., Cai, Z., Rogers, E., Freeman, C.T., and Lewin, P.L., Experimentally Supported 2D Systems Based Iterative Learning Control Law Design for Error Convergence and Performance, Control Eng. Practice, 2010, vol. 18, pp. 339–348.
Paszke, W., Rogers, E., Gałkowski, K., and Cai, Z., Robust Finite Frequency Range Iterative Learning Control Design with Experimental Verification, Control Eng. Practice, 2013, vol. 23, pp. 1310–1320.
Bristow, D. A., Tharayil, M. & Alleyne, A. G. A Survey of Iterative Learning Control. IEEE Control Syst. Mag. 26(no. 3), 96–114 (2006).
Ahn, H.-S., Chen, Y. Q. & Moore, K. L. Iterative Learning Control: Brief Survey and Categorization. IEEE Trans. Syst., Man, Cybernet., Part C: Appl. Rev. 37(no. 6), 1099–1121 (2007).
Sammons, P. M., Gegel, M. L., Bristow, D. A. & Landers, R. G. Repetitive Process Control of Additive Manufacturing with Application to Laser Metal Deposition. IEEE Trans. Control Syst. Technol. 27(no. 2), 566–575 (2019).
Freeman, C. T., Rogers, E., Hughes, A.-M., Burridge, J. H. & Meadmore, K. L. Iterative Learning Control in Health Care: Electrical Stimulation and Robotic-Assisted Upper-Limb Stroke Rehabilitation. IEEE Control Syst. Magaz. 32(no. 1), 18–43 (2012).
Meadmore, K.L., Exell, T.A., Hallewell, E., Hughes, A.-M., Freeman, C.T., Kutlu, M., Benson, V., Rogers, E., and Burridge, J.H.The Application of Precisely Controlled Functional Electrical Stimulation to the Shoulder, Elbow and Wrist for Upper Limb Stroke Rehabilitation: a Feasibility Study, J. Neuro Eng. Rehabil., 2014, vol. 11, no. 105.
Bochniak, J., Gałkowski, K. Rogers, E. Multi-machine Operations Modelled and Controlled as Switched Linear Repetitive Processes. Int. J. Control 81, 1549–1567 (2008).
Bochniak, J., Gałkowski, K., Rogers, E., Mehdi, D., Bachelier, O. & Kummert, A. Stabilization of Discrete Linear Repetitive Processes with Switched Dynamics. Multidim. Syst. Sign. Process. 17, 271–295 (2006).
Shao, Z. & Xiang, Z. Iterative Learning Control for Non-linear Switched Discrete-time Systems. IET Control Theory Appl. 11(no. 6), 883–889 (2017).
Shao, Z. and Duan, Z.A High-order Iterative Learning Control for Discrete-time Linear Switched Systems, Proc. 57th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Nara, Japan, 2018, pp. 354–361.
Ouerfelli, H., BenAttia, S. & Salhi, S. Switching-iterative Learning Control Method for Discrete-time Switching System. Int. J. Dynamics Control 6, 1755–1766 (2018).
Shao, Z. & Xiang, Z. Adaptive Iterative Learning Control for Switched Nonlinear Continuous-time Systems. Int. J. Syst. Sci. 50(no. 5), 1028–1038 (2019).
Pakshin, P., Emelianova, J., Emelianov, M., Gałkowski, K. Rogers, E. Dissipativity and Stabilization of Nonlinear Repetitive Processes. Syst. Control Lett. 91, 14–20 (2016).
Pakshin, P., Emelianova, J., Gałkowski, K. Rogers, E. Stabilization of Two-dimensional Nonlinear Systems Described by Fornasini-Marchesini and Roesser Models. SIAM J. Control Optim. 56, 3848–3866 (2018).
Pakshin, P., Emelianova, J., Emelianov, M., Gałkowski, K. & Rogers, E. Passivity Based Stabilization of Repetitive Processes and Iterative Learning Control Design. Syst. Control Lett. 122, 101–108 (2018).
Emelianova, J. P. & Pakshin, P. V. Iterative Learning Control Design Based on State Observer. Autom. Remote Control 80(no. 9), 1561–1573 (2019).
Apkarian, J., Karam, P. & Levis, M. Workbook on Flexible Link Experiment for Matlab/Simulink Users. (Quanser, Markham, 2011).
Author information
Authors and Affiliations
Rights and permissions
About this article

Cite this article
Pakshin, P., Emelianova, J. Iterative Learning Control Design for Switched Systems. Autom Remote Control 81, 1461–1474 (2020). https://doi.org/10.1134/S0005117920080081
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0005117920080081