
Abstract
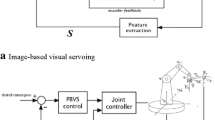
Visual servo control rules that refer to the control methods of robot motion planning using image data acquired from the camera mounted on the robot have been widely applied to the motion control of robotic arms or mobile robots. The methods are usually classified as image-based visual servo, position-based visual servo, and hybrid visual servo (HVS) control rules. Mobile manipulation enhances the working range and flexibility of robotic arms. However, there is little work on applying visual servo control rules to the motion of the whole mobile manipulation robot. We propose an HVS motion control method for a mobile manipulation robot which combines a six-degree-of-freedom (6-DOF) robotic arm with a nonholonomic mobile base. Based on the kinematic differential equations of the mobile manipulation robot, the global Jacobian matrix of the whole robot is derived, and the HVS control equation is derived using the whole Jacobian matrix combined with position and visual image information. The distance between the gripper and target is calculated through the observation of the marker by a camera mounted on the gripper. The differences between the positions of the markers’ feature points and the expected positions of them in the image coordinate system are also calculated. These differences are substituted into the control equation to obtain the speed control law of each degree of freedom of the mobile manipulation robot. To avoid the position error caused by observation, we also introduce the Kalman filter to correct the positions and orientations of the end of the manipulator. Finally, the proposed algorithm is validated on a mobile manipulation platform consisting of a Bulldog chassis, a UR5 robotic arm, and a ZED camera.
摘要
视觉伺服控制规则是指利用机器人上所安装相机获取的图像数据进行机器人运动规划的控制方法, 通常分为基于图像的视觉伺服、 基于位置的视觉伺服和混合视觉伺服 (HVS) 控制规则. 移动操作可扩大机械臂的工作范围和灵活性, 但目前将视觉伺服控制应用于完整移动作业机器人运动的研究较少. 本文提出一种面向6自由度机械臂与非完整移动基座组合构成的移动操作机器人HVS运动控制方法. 基于移动操作机器人的运动学微分方程, 推导了整个机器人的全局雅可比矩阵, 进而结合位置信息和视觉图像信息推导了HVS控制方程. 夹持器和目标之间的距离是通过安装在夹持器上的摄像机观察标记来计算的, 并计算了在图像坐标系中标记特征点位置与期望位置之间的差异. 将这些差异代入控制方程, 可得到移动操作机器人各自由度的速度控制规律. 为避免由观测引起的位置误差, 引入卡尔曼滤波来校正机械臂末端的位置和方向. 最后, 在一台由Bulldog底盘、 UR5机械臂和ZED相机组成的移动操作平台上进行了实验验证.
Similar content being viewed by others

Explore related subjects
Discover the latest articles and news from researchers in related subjects, suggested using machine learning.References
Agravante DJ, Chaumette F, 2017. Active vision for pose estimation applied to singularity avoidance in visual servoing. IEEE/RSJ Int Conf on Intelligent Robots and Systems, p.2947–2952. https://doi.org/10.1109/IROS.2017.8206129
Bateux Q, Marchand E, Leitner J, et al., 2017. Visual servoing from deep neural networks. https://arxiv.org/abs/170508940
Benhimane S, Malis E, 2007. Homography-based 2D visual tracking and servoing. Int J Robot Res, 26(7):661–676. https://doi.org/10.1177/0278364907080252
Chaumette F, Hutchinson S, 2006. Visual servo control. I. Basic approaches. IEEE Robot Autom Mag, 13(4):82–90. https://doi.org/10.1109/MRA.2006.250573
Chaumette F, Hutchinson S, 2007. Visual servo control. II. Advanced approaches. IEEE Robot Autom Mag, 14(1):109–118. https://doi.org/10.1109/MRA.2007.339609
Dong GQ, Zhu ZH, 2015. Position-based visual servo control of autonomous robotic manipulators. Acta Astronaut, 115:291–302. https://doi.org/10.1016/j.actaastro.2015.05.036
Fantacci C, Vezzani G, Pattacini U, et al., 2018. Markerless visual servoing on unknown objects for humanoid robot platforms. IEEE Int Conf on Robotics and Automation, p.3099–3106. https://doi.org/10.1109/icra.2018.8462914
Hafez AHA, Cervera E, Jawahar C, 2008. Hybrid visual servoing by boosting IBVS and PBVS. 3rd Int Conf on Information and Communication Technologies: from Theory to Applications, p.1–6. https://doi.org/10.1109/ICTTA.2008.4530116
Horaud R, Conio B, Leboulleux O, et al., 1989. An analytic solution for the perspective 4-point problem. Comput Vis Graph Image Process, 47(1):33–44. https://doi.org/10.1016/0734-189X(89)90052-2
Hu G, MacKunis W, Gans N, et al., 2008. Homography-based visual servo control via an uncalibrated camera. American Control Conf, p.4791–4796. https://doi.org/10.1109/ACC.2008.4587252
Kermorgant O, Chaumette F, 2011. Combining IBVS and PBVS to ensure the visibility constraint. IEEE/RSJ Int Conf on Intelligent Robots and Systems, p.2849–2854. https://doi.org/10.1109/IROS.2011.6094589
Lang HX, Khan MT, Tan KK, et al., 2016. Application of visual servo control in autonomous mobile rescue robots. Int J Comput Commun Contr, 11(5):685–696. https://doi.org/10.15837/ijccc.2016.5.2680
Levine S, Pastor P, Krizhevsky A, et al., 2016. Learning hand-eye coordination for robotic grasping with large-scale data collection. Int Symp on Experimental Robotics, p.173–184. https://doi.org/10.1007/978-3-319-50115-4_16
Sandy T, Buchli J, 2017. Dynamically decoupling base and end-effector motion for mobile manipulation using visual-inertial sensing. IEEE/RSJ Int Conf on Intelligent Robots and Systems, p.6299–6306. https://doi.org/10.1109/IROS.2017.8206533
Tsakiris DP, Rives P, Samson C, 1998. Extending visual servoing techniques to nonholonomic mobile robots. In: Kriegman DJ, Hager GD, Morse AS (Eds.), The Confluence of Vision and Control. Springer, London, p.106–117. https://doi.org/10.1007/BFb0109666
Wang Y, Zhang GL, Lang HX, et al., 2014. A modified image-based visual servo controller with hybrid camera configuration for robust robotic grasping. Robot Auton Syst, 62(10): 1398–1407. https://doi.org/10.1016/j.robot.2014.06.003
Zhong XG, Zhong XY, Peng XF, 2015. Robots visual servo control with features constraint employing Kalman-neural-network filtering scheme. Neurocomputing, 151:268–277. https://doi.org/10.1016/j.neucom.2014.09.043
Author information
Authors and Affiliations
Contributions
Wei LI designed the research, conducted the experiments, and drafted the manuscript. Rong XIONG helped improve the idea and organize the manuscript. Wei LI and Rong XIONG revised and finalized the paper.
Corresponding author
Ethics declarations
Wei LI and Rong XIONG declare that they have no conflict of interest.
Additional information
Project supported by the National Natural Science Foundation of China (No. U1609210) and Science and Technology Project of Zhejiang Province, China (No. 2019C01043)
Rights and permissions
About this article

Cite this article
Li, W., Xiong, R. A hybrid visual servo control method for simultaneously controlling a nonholonomic mobile and a manipulator. Front Inform Technol Electron Eng 22, 141–154 (2021). https://doi.org/10.1631/FITEE.1900460
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1631/FITEE.1900460