
Abstract
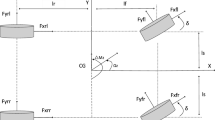
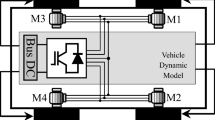
In order to further improve the handling stability of four-wheel-independent-drive electric vehicle, the control strategy designed in this paper adopts the hierarchical structure. The upper controller uses the vehicle dynamics principle and relevant expert control experience to formulate the corresponding fuzzy control rules to build the fuzzy controller. The linear two-degree-of-freedom reference model is built to obtain the desired driving state information of the vehicle, and the corresponding deviations are obtained by comparing with the actual vehicle state information, which are the input of the designed fuzzy controller to obtain the additional yaw moment required for stable driving of the vehicle. The lower controller obtains the generation mechanism of additional yaw moment through the 7-degree-of-freedom vehicle model and the characteristics of tire friction ellipse. Based on this, the regular distribution strategy is designed to obtain the driving torque on each driving motor. Through Carsim/Simulink joint simulation and hardware-in-the-loop experiments based on MicroAutoBox, the effectiveness and real-time performance of the designed control strategy are fully verified, and accelerate the development process of vehicle controller.










Similar content being viewed by others

Explore related subjects
Discover the latest articles and news from researchers in related subjects, suggested using machine learning.REFERENCES
Guo, L., Lin, X., Ge, P., Qiao, Y., Xu, L., and Li, J., Torque distribution for electric vehicle with four in-wheel motors by considering energy optimization and dynamics performance, 2017 IEEE Intelligent Vehicles Symposium (IV), 2017.
Chunyan, W., Wenkui, L.I., Wanzhong, Z., and Tingting, D., Torque distribution of electric vehicle with four in-wheel motors based on road adhesion margin, Trans. Nanjing Univ. Aeronaut. Astronaut., 2019, vol. 36, no. 1, pp. 185–192.
Zhao, Y., and Zhang, C., Electronic stability control for improving stability for an eight in-wheel motor-independent drive electric vehicle, Shock Vib., 2019, pp. 1–21.
De Filippis, G., Lenzo, B., Sorniotti, A., Gruber, P., and De Nijs, W., Energy-efficient torque-vectoring control of electric vehicles with multiple drivetrains, IEEE Trans. Veh. Technol., 2018, vol. 67, no. 6, pp. 4702–4715.
Eto, R., Sakata, K., and Yamakawa, J., Driving force distribution based on tire energy for independent wheel-drive vehicle on rough ground, J. Terramech., 2018, vol. 76, pp. 29–38.
Chen, Y., Chen, S., Zhao, Y., Gao, Z., and Li, C., Optimized handling stability control strategy for a four in-wheel motor independent-drive electric vehicle, IEEE Access, 2019, vol. 7, pp. 17017–17032.
Dai, Y., Luo, Y., and Li, K., Longitudinal and lateral coordinated motion control of four-wheel-independent drive electric vehicles, Electric Vehicle Symposium and Exhibition, IEEE, 2014.
Wang, J., Luo, Z., Wang, Y., Yang, B., and Assadian, F., Coordination control of differential drive assist steering and vehicle stability control for four-wheel-independent-drive EV, IEEE Trans. Veh. Technol., 2018, vol. 67, no. 12, pp. 11453–11467.
Xiong, L., Chen, C., and Feng, Y. Modeling of distributed drive electric vehicle based on co-simulation of Carsim/Simulink, J. Syst. Simul., 2014, vol. 26, no. 5, pp. 1143–1151.
Xiong, L., Teng, G.W., Yu, Z.P., Zhang, W.X., and Feng, Y., Novel stability control strategy for distributed drive electric vehicle based on driver operation intention, Int. J. Automot. Technol., 2016, vol. 17, no. 4, pp. 651–663.
Yu, Z., Leng, B., Xiong, L., Feng, Y., and Shi, F., Direct yaw moment control for distributed drive electric vehicle handling performance improvement, Chin. J. Mech. Eng., 2016, vol. 29, no. 3, pp. 486–497.
Wang, J., Wang, Q., Jin, L., and Song, C., Independent wheel torque control of 4wd electric vehicle for differential drive assisted steering, Mechatronics, 2011, vol. 21, no. 1, pp. 63–76.
Wang, R. and Wang, J., Modeling and fault-tolerant-control of four-wheel-independent-drive EVs, in Modeling, Dynamics and Control of Electrified Vehicles, Woodhead Publ., 2018.
Li, B., Goodarzi, A., Khajepour, A., Chen, S.K., and Litkouhi, B., An optimal torque distribution control strategy for four-independent wheel drive electric vehicles, Veh. Syst. Dyn., 2015, vol. 53, no. 8, pp. 1172–1189.
Dizqah, A.M., Lenzo, B., Sorniotti, A., Gruber, P., and Smet, J.D., A fast and parametric torque distribution strategy for four-wheel-drive energy-efficient electric vehicles, IEEE Trans. Ind. Electron., 2016, vol. 63, no. 7, pp. 4367–4376.
Khan, M.A., Aftab, M.F., Ahmed, E., and Youn, I., Robust differential steering control system for an independent four wheel drive electric vehicle, Int. J. Automot. Technol., 2019, vol. 20, no. 1, pp. 87–97.
Funding
This work was supported by the National Natural Science Foundation of China (51974229).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The authors declare no conflict of interest.
About this article

Cite this article
Chuanwei Zhang, Zhang, R., Wang, R. et al. Design of Torque Distribution Strategy for Four-Wheel-Independent-Drive Electric Vehicle. Aut. Control Comp. Sci. 54, 501–512 (2020). https://doi.org/10.3103/S0146411620060103
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S0146411620060103