




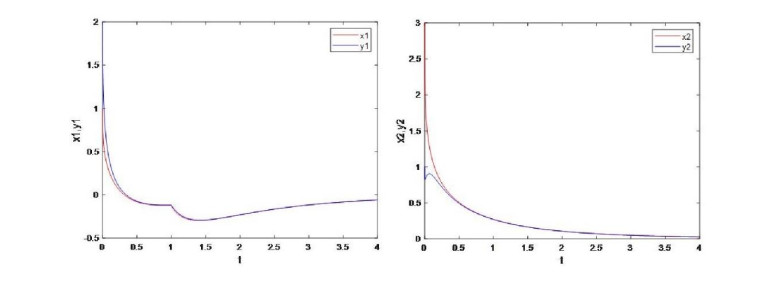
Figure 1.
Evolution of the solutions for systems (4.1) and (4.3) with the initial values Eq (4.4).
The synchronization problem of delayed nonautonomous neural networks with Caputo derivative is studied in this article. Firstly, new neural networks are proposed by introducing variable parameters into known models, and the analytical formula of the synchronous controller is given according to the new neural networks. Secondly, from the drive-response systems corresponding to the above delayed neural networks, their error system is obtained. Thirdly, by constructing the Lyapunov function and utilizing the Razumikhin-type stability theorem, the asymptotic stability of zero solution for the error system is verified, and some sufficient conditions are achieved to ensure the global asymptotic synchronization of studied neural networks. Finally, some numerical simulations are given to show the availability and feasibility of our obtained results.
Citation: Lili Jia, Changyou Wang, Zongxin Lei. Synchronization of nonautonomous neural networks with Caputo derivative and time delay[J]. Networks and Heterogeneous Media, 2023, 18(1): 341-358. doi: 10.3934/nhm.2023013
| [1] | Jun Guo, Yanchao Shi, Yanzhao Cheng, Weihua Luo . Projective synchronization for quaternion-valued memristor-based neural networks under time-varying delays. Networks and Heterogeneous Media, 2024, 19(3): 1156-1181. doi: 10.3934/nhm.2024051 |
| [2] | Yinlin Ye, Yajing Li, Hongtao Fan, Xinyi Liu, Hongbing Zhang . SLeNN-ELM: A shifted Legendre neural network method for fractional delay differential equations based on extreme learning machine. Networks and Heterogeneous Media, 2023, 18(1): 494-512. doi: 10.3934/nhm.2023020 |
| [3] | Tingting Zhu . Synchronization of the generalized Kuramoto model with time delay and frustration. Networks and Heterogeneous Media, 2023, 18(4): 1772-1798. doi: 10.3934/nhm.2023077 |
| [4] | Wenlian Lu, Fatihcan M. Atay, Jürgen Jost . Consensus and synchronization in discrete-time networks of multi-agents with stochastically switching topologies and time delays. Networks and Heterogeneous Media, 2011, 6(2): 329-349. doi: 10.3934/nhm.2011.6.329 |
| [5] | Seung-Yeal Ha, Se Eun Noh, Jinyeong Park . Practical synchronization of generalized Kuramoto systems with an intrinsic dynamics. Networks and Heterogeneous Media, 2015, 10(4): 787-807. doi: 10.3934/nhm.2015.10.787 |
| [6] | Wenkai Liu, Yang Liu, Hong Li, Yining Yang . Multi-output physics-informed neural network for one- and two-dimensional nonlinear time distributed-order models. Networks and Heterogeneous Media, 2023, 18(4): 1899-1918. doi: 10.3934/nhm.2023080 |
| [7] | Pau Erola, Albert Díaz-Guilera, Sergio Gómez, Alex Arenas . Modeling international crisis synchronization in the world trade web. Networks and Heterogeneous Media, 2012, 7(3): 385-397. doi: 10.3934/nhm.2012.7.385 |
| [8] | Chenchen Li, Chunyan Zhang, Lichao Feng, Zhihui Wu . Note on prescribed-time stability of impulsive piecewise-smooth differential systems and application in networks. Networks and Heterogeneous Media, 2024, 19(3): 970-991. doi: 10.3934/nhm.2024043 |
| [9] | Regino Criado, Rosa M. Benito, Miguel Romance, Juan C. Losada . Preface: Mesoscales and evolution in complex networks: Applications and related topics. Networks and Heterogeneous Media, 2012, 7(3): i-iii. doi: 10.3934/nhm.2012.7.3i |
| [10] | Sujit Nair, Naomi Ehrich Leonard . Stable synchronization of rigid body networks. Networks and Heterogeneous Media, 2007, 2(4): 597-626. doi: 10.3934/nhm.2007.2.597 |
The synchronization problem of delayed nonautonomous neural networks with Caputo derivative is studied in this article. Firstly, new neural networks are proposed by introducing variable parameters into known models, and the analytical formula of the synchronous controller is given according to the new neural networks. Secondly, from the drive-response systems corresponding to the above delayed neural networks, their error system is obtained. Thirdly, by constructing the Lyapunov function and utilizing the Razumikhin-type stability theorem, the asymptotic stability of zero solution for the error system is verified, and some sufficient conditions are achieved to ensure the global asymptotic synchronization of studied neural networks. Finally, some numerical simulations are given to show the availability and feasibility of our obtained results.
For the actual neural network system, it will be affected by the outside world or its own system, which will lead to the deterioration of the stability and even the instability of the system. Therefore, when the neural networks with fractional-order (FO) derivative are selected as the research target, it is necessary to consider the above effects. And then, it is an important topic to analyze the stability of the system and how to design a system synchronous controller simply and effectively. Only by doing these things well can we effectively use the FO neural network and apply it better in practice. Synchronization is one of the dynamic behaviors of actual systems, which exists widely in real life. Therefore, studying the synchronization of FO neural network models is meaningful and extremely important. In view of this, a lot of scholars have paid attention to the synchronization issues of neural networks with FO derivative, see [1,2,3,4,5,6,7] and the references therein.
Yu et al. [8] analyzed the following neural networks with FO derivative in 2014
| Dαxi(t)=−aixi(t)+n∑j=1cijfj(xj(t))+Ii,xi(t0)=x0i,i=1,2,⋯,n. | (1.1) |
where 0<α<1. Based on some analytical techniques and combining effective control method, some new criteria for guaranteeing the projection synchronization of the neural networks with FO derivative are achieved. In 2015, Bao et al. [9] investigated the projective synchronization of FO memristor-based neural networks corresponding to model (1.1) and achieved some sufficient conditions by utilizing a FO differential inequality. In 2018, Hu et al. [10] studied the neural network model (1.1), and the global synchronization problem was considered. Firstly, some properties for fractional calculus are discussed, and the stability theorem for the neural network model (1.1) is proposed. Moreover, a new feedback controller is given. Finally, some sufficient conditions ensuring the global synchronization of the neural network model (1.1) are given by utilizing the matrix inequality technique and the obtained stability theorem. However, it can be seen that there is no delay term in model (1.1). Because time delays are inevitable in practical network fields, the real-world neural network model should contain time delays. Therefore, in recent years, more and more scholars focus on the dynamic behavior of delayed neural networks with FO derivative. For example, Wang et al. [11] researched the following delayed FO Hopfield neural network as described below in 2015
| Dqtxi(t)=−aixi(t)+∑nj=1bijfj(xj(t))+∑nj=1cijgj(xj(t−τij)),t>0,i=1,2,⋯,n, | (1.2) |
where q∈(0,1),ai,bij,cij are constants, and acquired some stability conditions of solution for the FO network system (1.2) according to the Laplace transform and linearization method. In 2017, Peng et al. [12] considered the following FO neural networks with time delays and discontinuous activation functions
| ctDα0x(t)=−Cx(t)+Af(x(t))+Bf(x(t−τ))+I, | (1.3) |
where x(t)=(x1(t),x2(t),⋯,xn(t))∈Rn is the state vector of neuron at time t. Several sufficient conditions ensuring the global synchronization of neural networks (1.3) are given by using the property of matrix inequalities and the theory of FO differential inclusion. Zhang et al. [13] paid attention to the following neural networks with FO derivative and delays in 2018
| Dαxi(t)=−cixi(t)+n∑j=1aijfj(xj(t))+n∑j=1bijfj(xj(t−τ))+Ii, | (1.4) |
where 0<α<1,iϵN=1,2,…,n, and derived several new synchronization conditions of the delayed system (1.4) by utilizing the corresponding theoretical knowledge. In 2020, Wang et al. [14] investigates the problem of event-based sliding-mode synchronization of memristive neural networks with delay by means of continuous/ periodic sampling algorithm. More recently, in 2021, Wang et al. [15] considered the multiple delayed FO neural networks with Caputo derivatives as described below
| Dαxi(t)=−aixi(t)+n∑j=1bijgj(xj(t))+n∑m=1n∑j=1c(m)ijfj(xj(t−mτ))+Ii,i=1,2,⋯,n, | (1.5) |
where 0<α<1, and obtained some synchronization conditions of the delayed FO neural networks (1.5) by constructing a suitable Lyapunov function and using the properties of delayed differential inequality. In 2022, Hui et al. [16] investigated a kind of variable-delay FO complex-valued neural networks and achieved the adaptive synchronization results of the network system, Ye et al. [17] considered a kind of variable-parameter FO neural networks and obtained two types of quasi-synchronization results of the network system, and Zhao et al. [18,19] discussed respectively PID control, adaptive control, pinning control, and impulsive control for a class of complex networks.
On the other hand, as we all know, it is challenging to obtain the exact values of model parameters when we build mathematical models. The main reason is the environmental disturbance that leads to parameter uncertainty. Hence, when we discuss the dynamic properties of nonlinear systems, we cannot ignore the effect of these parameter nondeterminacy, because parameter indeterminacy will damage the synchronization, stability, or any other performances of the nonlinear system. Recently, the synchronization of neural network models with parameter nondeterminacy has received extensive attention from many scholars, such as Yang et al. [20] in 2018 considered the parameter nondeterminacy to study a kind of FO memristor-based complex-valued neural networks described below
| Dαzj(t)=−cjzj(t)+n∑k=1[ajk(zk(t))+Δajk(t)]fk(zk(t))+n∑k=1[bjk(zk(t))+Δbjk(t)]gk(zk(t−τ))+Jj(t),j=1,2,⋯,n, | (1.6) |
and several effective global asymptotically synchronization results of the neural networks system (1.6) are obtained. It is particularly worth mentioning that Wang et al. [21] researched the nonautonomous delayed neural networks with FO derivatives as described below in 2020
| Dαxi(t)=ept[−aixi(t)+n∑j=1bijfj(xj(t))+n∑j=1cijfj(xj(t−τ))]+Ii,,i=1,2,⋯,n. | (1.7) |
Firstly, the authors obtained the analytical formula of the synchronous controller for the delayed neural networks (1.7) according to the new state control schemes and Mittag-Leffler function. Secondly, by improving some new analytical techniques, using delay differential inequalities and building appropriate Lyapunov functions, the authors achieved several sufficient conditions to ensure the global synchronization of the FO nonautonomous delayed neural networks (1.7).
However, in the existing work, nonautonomous delayed FO neural networks (DFNNs) have rarely been discussed. Because of the fact that the self-inhibition rate and the connection weight between neurons in the neural networks should be a time-varying function, not a constant, the nonautonomous DFNNs can preferably simulate the interaction between neurons in the network system. Therefore, inspired by the existing work, the purpose of this article is to research the synchronization of a nonautonomous DFNNs with Caputo derivatives. By constructing the Lyapunov function, the asymptotic stability of zero solution for the error system is verified, and some sufficient conditions are achieved to ensure the global synchronization behaves well. The remainder of this work is organized as follows. In Section 2, some definitions and lemmas are presented, and new neural networks are proposed. In Section 3, the global asymptotically synchronization controller is obtained, and some criteria ensuring the global asymptotically synchronization for the new neural networks are afforded. In Section 4, the feasibility of the obtained theoretical results is shown by some numerical simulations. In the last part, the conclusions are summarized.
Remark 1: As we all know, there is no general rule in the design of the synchronization controller of the neural network, which brings difficulties and challenges to the design of the controller. An excellent controller should have two main characteristics: first, it is simple and easy to realize, and second, it has good robustness. The following is the summary of contributions and innovations of this article: (1) In order to preferably represent the interaction between neurons, new neural networks are proposed by introducing the variable-parameters into the known DFNNs. Our new model cover the autonomous DFNNs and FNNs with Caputo derivatives in the literature. (2) Utilizing the delayed FO differential inequalities and Razumikhin-type stability theorem of the delayed FO differential system, some sufficient conditions are achieved to ensure the global synchronization of studied neural networks. In particular, our synchronization control scheme has strong robustness to the above new model. (3) In contrast with the previous works in the literature [8,12,13,21], our controller is simpler and easier to implement. Secondly, our criterion for ensuring the synchronization of drive-response systems is easier to verify, which can provide more convenience for the application by using these results into DFNNs.
In this article, R is a real space, and Rm is an m-dimensional Euclidean space. The norm ‖⋅‖ in Rm is expressed as an arbitrary norm and N+ is a set of positive integers. Next, we will recommend several definitions and lemmas.
Definition 1. [22,23] The fractional integral of the integrable function x(t) is defined as
| D−αt0x(t)=1Γ(α)∫tt0(t−s)α−1x(s)ds, | (2.1) |
where t⩾t0, order α>0. Γ(⋅) is a Gamma function, which is defined as
| Γ(α)=∫∞0e−ttα−1dt. | (2.2) |
It is obvious that Γ(α) satisfies recursive relationship Γ(α+1)=α Γ(α).
As above mentioned, the Caputo FO derivative has a more practical significance in the physical system and is more suitable for describing the actual system with the initial value than the Riemann-Liouville (R-L) FO derivative and the Grunwald-Letnikov (G-L) FO derivative. Thus in practical applications, the Caputo differential operation is more used than the R-L differential operation and the G-L differential operation. So, the definition of the Caputo FO derivative will also be used in this paper.
Definition 2. [22,23] The Caputo FO derivative of function x(t)∈Cn([0,∞),R) is defined as
| Dαt0x(t)=1Γ(n−α)∫tt0(t−s)n−α−1(dds)nx(s)ds,n−1⩽α<n, | (2.3) |
where α represents the order of the derivative.
In particular, when 0<α<1, there is
| Dαx(t)=1Γ(1−α)∫tt0(t−s)−αx′(s)ds. | (2.4) |
Lemma 1. [22] For any constant c1,c2, if w(t),u(t)∈C([t0,+∞),R), α>0,β>0, then
| (1)DαD−βw(t)=Dα−βw(t),(2)D−αDαw(t)=w(t),(3)Dα(c1w(t)±c2u(t))=c1Dαw(t)±c2Dαu(t). |
Lemma 2. [24] Set f(t)∈Rn is a differentiable vector value function, P∈Rm×n is a symmetric positive definite real matrix, then we have the following inequalities
| Dα(fT(s)Pf(s))≤2fT(s)PDαf(s), | (2.5) |
where α∈[0,1], s⩾s0.
Lemma 3. [25] If there is a continuously differentiable function V:R×Rn→R and two positive constants p,q with p<q such that
| DαV(t,x(t))≤−qV(t,x(t))+psup | (2.6) |
for , then the differential system with Captuto derivative
| (2.7) |
is globally asymptotically stable.
In this article, a non-autonomous DFNNs with Caputo derivative are researched, and the systems are described as follows
| (2.8) |
or written as a vector form
| (2.9) |
where represents the number of neurons, represents a state variable of neuron at time , represents the propagation delay of the neuron, represents a state variable of neuron at time , and denote an excitation function of a neuron, denotes a self-joining weight matrix of a neuron, denotes an internal connection weight matrix when there is no time delay, denotes an internal connection weight matrix when there exists time delay, and denotes an external input vector.
In this section, the synchronization of the nonautonomous DFNNs with Caputo derivative are studied and several sufficient results are given. In this work, if we regard the system (2.8) as the driving system, the following is the corresponding response system
| (3.1) |
write as a vector representation
| (3.2) |
here represents a state variable from the system (18), the representation of is consistent with the drive system (2.8), represents the synchronous controller of the system.
Set the error vector , then the expression of the error system can be obtained from the drive system (2.8) and response system (3.1)
| (3.3) |
write as a vector representation
| (3.4) |
where
Through analysis, it can be found that the global synchronization of drive-response system (2.8) and (3.1) is equivalent to the global asymptotic stability of the zero solution for error system (3.3). In this article, the activation function is a common Lipschitz continuous, and the following assumptions are necessary to prove the main conclusions of this paper.
Suppose that there exist constants , such that
for all
Suppose that , and each element in matrices is bounded function.
Theorem 1. Assume that assumption and are satisfied, then the driving systems (2.8) and response system (3.1) are globally asymptotically synchronized under the controller as follow
| (3.5) |
where depends on
Proof: Let
| (3.6) |
| (3.7) |
here and which satisfies can be appropriately selected.
Constructing the Lyapunov function
| (3.8) |
From the assumption , it holds that
| (3.9) |
According to the assumption Lemma 1, Lemma 2, the Eqs (3.3), (3.5) and (3.9), the Caputo derivative of along the system (3.3) is as follow
| (3.10) |
According to the trigonometric inequality, we can get
| (3.11) |
thus, from Eqs (3.10) and (3.11), it holds that
| (3.12) |
Moreover, for any given , there exists a such that
| (3.13) |
From Eqs (3.12) and (3.13), we have
| (3.14) |
Base on Lemma 3 and Eq (3.14), under the controller Eq (3.5) the zero solution of the error system (3.3) is globally asymptotically stable. That is to say, the drive system (2.8) and the response system (3.1) is globally asymptotically synchronized. This complete the proof of Theorem 1.
In this section, the effectiveness of results for FO delayed nonautonomous neural networks Eq (2.8) is shown by a numerical example. The numerical simulation of the instantiated system is carried out by MATLAB simulation software, and the simulation results are analyzed to verify the correctness of the above theoretical analysis and derivation.
Example 1. Consider the two-dimensional non-autonomous DFNNs with Caputo derivative Eq (2.8). Matrices of the self-joining weights and of the internal connection weights at present as well as of the internal connection weights at the delay time for the neural networks Eq (2.8) are selected as
Set the state variable at time the delay the derivative order the external input vector and the activation function vectors Thus, the numerical simulation model of the drive system is as follows
| (4.1) |
note that assumptions and are satisfied with . Set the controller return matrix , thus, the state-feedback controller is designed as follows
| (4.2) |
Therefore, the numerical simulation model of the response system is as follows
| (4.3) |
Through simple calculation, we can get So the conditions of Theorem 1 is satisfied. According to Theorem 1, the drive-response systems (4.1) and (4.3) from the nonauto- nomous DFNNs with Caputo derivative are globally asymptotically synchronized.
The initial values of the drive system (4.1) and the response system (4.3) are taken as follows
| (4.4) |
The solutions of the drive-response systems (4.1) and (4.3) with the initial values Eq (4.4) are shown in Figure 1. Moreover, the differences between the components of both solutions are shown in Figure 2. As it can be shown, these differences approach 0 very fast. From Figures 1 and 2, it is easy to determine that the drive-response systems (4.1) and (4.3) with the initial values Eq (4.4) are globally asymptotically synchronized. And then, the conclusion of Theorem 1 is verified.

To further verify that the drive-response systems (4.1) and (4.3) are globally asymptotically synchronized, different initial conditions, different fractional orders, and different time delays are selected respectively for simulation, which is shown in Figures 3-8.






It can be found from Figures 3 and 4 that in the case of selecting different initial values, the curves of solutions for the drive-response systems (4.1) and (4.3) tend to be consistent, and the error curves of the solutions of the systems (4.1) and (4.3) tend to zero. From Figures 5 and 6, it is easy to see that in the case of selecting different fractional orders, the curves of solutions for the drive-response systems (4.1) and (4.3) tend to be consistent, and the error curves of the solutions of systems (4.1) and (4.3) tend to zero. It can also be seen from Figures 7 and 8, in the case of selecting different time delays, the curves of solutions for the drive-response systems (4.1) and (4.3) tend to be consistent, and the error curves of the solutions of the systems (4.1) and (4.3) tend to zero.
In summary, when different initial conditions, different fractional orders, and different time delays are selected respectively for simulation, the error curves eventually tend to zero, which verifies that the drive system (4.1) is globally asymptotically synchronized with the response system (4.3), and the initial conditions, the fractional orders and time delays only change the synchronization time, but not the synchronization behavior of the drive-response systems (4.1) and (4.3).
Next, some comparison experiments are given to show the performances of the proposed methods in this paper. Figures 9-14 are the experiment results based on the controller in reference [8]. By comparing Figures 3-8 and Figures 9-14, we can clearly see that the synchronization time of the controller in this paper is less than that of the controller in reference [8]. In addition, Figures 15 and 16 show the experimental results of the fractional derivatives with an order greater than 1 based on the controller in this paper. From the experimental results in Figures 15 and 16, it can be seen that when the derivative order is greater than 1, the drive-response system is not synchronized.








In this article, a class of delayed nonautonomous FO neural networks with Caputo derivatives is considered and the global synchronization problem of the above system is studied. Firstly, new FO neural networks are proposed by introducing variable parameters into known models, and the analytical formula of the synchronous controller is given according to the new neural networks. Secondly, from the drive-response systems corresponding to the above delayed FO neural networks, their error system is obtained. Thirdly, by constructing the Lyapunov function and utilizing the Razumikhin-type stability theorem, the asymptotic stability of zero solution for the error system is verified, and some sufficient conditions are achieved to ensure the global synchronization of studied neural networks. Finally, some numerical simulations are presented to show the availability and feasibility of our theoretical results. The theoretical results obtained in this article not only can effectively determine the synchronization of the new FO neural networks but also improve and extend some existing results [8,12,13,21].
This work is supported by General Projects of Local Science and Technology Development Funds Guided by the Central Government (Grant No: 2022ZYD0005), Key Project of Scientific Research and Innovation Team of Chengdu University of Information Technology(Grant No: KYTD202226), and the Scientific Research Fund of Chengdu University of Information Technology of China (Grant no. KYTZ201820).
The authors declare there is no conflict of interest.
| [1] |
Q. Song, Synchronization analysis of coupled connected neural networks with mixed time delays, Neurocomputing., 72 (2009), 3907–3914. https://doi.org/10.1016/j.neucom.2009.04.009 doi: 10.1016/j.neucom.2009.04.009

|
| [2] |
H. Bao, J. H. Park, J. Cao, Adaptive synchronization of fractional-order memristor-based neural networks with time delay, Nonlinear. Dynam., 82 (2015), 1343–1354. https://doi.org/10.1007/s11071-015-2242-7 doi: 10.1007/s11071-015-2242-7
|
| [3] |
G. Velmurugan, R. Rakkiyappan, J. Cao, Finite-time synchronization of fractional-order memristor-based neural networks with time delays, Neural. Networks., 73 (2016), 36–46. https://doi.org/10.1016/j.neunet.2015.09.012 doi: 10.1016/j.neunet.2015.09.012
|
| [4] |
Y. Gu, Y. Yu, H. Wang, Synchronization for fractional-order time-delayed memristor-based neural networks with parameter uncertainty, J. Franklin. I., 353 (2016), 3657–3684. https://doi.org/10.1016/j.jfranklin.2016.06.029 doi: 10.1016/j.jfranklin.2016.06.029
|
| [5] |
I. Stamova, G. Stamov, Mittag-Leffler synchronization of fractional neural networks with time-varying delays and reaction-diffusion terms using impulsive and linear controllers, Neural. Networks., 96 (2017), 22–32. https://doi.org/10.1016/j.neunet.2017.08.009 doi: 10.1016/j.neunet.2017.08.009
|
| [6] |
H. P. Hu, J. K. Wang, F. L. Xie, Dynamics analysis of a new fractional-order hopfield neural network with delay and its generalized projective synchronization, Entropy-Switz., 21 (2019), 1. https://doi.org/10.3390/e21010001 doi: 10.3390/e21010001
|
| [7] |
W. Zhang, J. Cao, R. Wu, A. Alsaedi, F. E. Alsaadi, Projective synchronization of fractional-order delayed neural networks based on the comparison principle, Adv. Differ. Equ-NY., 2018 (2018), 73. https://doi.org/10.1186/s13662-018-1530-1 doi: 10.1186/s13662-018-1530-1
|
| [8] |
J. Yu, C. Hu, H. Jiang, X. Fan, Projective synchronization for fractional neural networks, Neural.Networks., 49 (2014), 87–95. https://doi.org/10.1016/j.neunet.2013.10.002 doi: 10.1016/j.neunet.2013.10.002
|
| [9] |
H. B. Bao, J. D. Cao, Projective synchronization of fractional-order memristor-based neural networks, Neural. Networks., 63 (2015), 1–9. https://doi.org/10.1016/j.neunet.2014.10.007 doi: 10.1016/j.neunet.2014.10.007
|
| [10] |
T. Hu, X. Zhang, S. Zhong, Global asymptotic synchronization of nonidentical fractional-order neural networks, Neurocomputing., 313 (2018), 39–46. https://doi.org/10.1016/j.neucom.2018.05.098 doi: 10.1016/j.neucom.2018.05.098
|
| [11] |
H. Wang, Y. Yu, G. Wen, S. Zhang, Stability analysis of fractional-order neural networks with time delay, Neural. Process. Lett., 42 (2015), 479–500. https://doi.org/10.1007/s11063-014-9368-3 doi: 10.1007/s11063-014-9368-3
|
| [12] |
X. Peng, H. Wu, K. Song, J. Shi, Global synchronization in finite time for fractional-order neural networks with discontinuous activations and time delays, Neural. Networks., 94 (2017), 46–54. https://doi.org/10.1016/j.neunet.2017.06.011 doi: 10.1016/j.neunet.2017.06.011
|
| [13] |
L. Zhang, Y. Yang, F. Wang, Synchronization analysis of fractional-order neural networks with time-varying delays via discontinuous neuron activations, Neurocomputing., 275 (2018), 40–49. https://doi.org/10.1016/j.neucom.2017.04.056 doi: 10.1016/j.neucom.2017.04.056
|
| [14] |
Y. Wang, Y. Cao, Z. Guo, T. Huang, S. Wen, Event-based sliding-mode synchronization of delayed memristive neural networks via continuous/periodic sampling algorithm, Appl. Math. Comput., 383 (2020), 125379. https://doi.org/10.1016/j.amc.2020.125379 doi: 10.1016/j.amc.2020.125379
|
| [15] |
C. Wang, Q. Yang, T. Jiang, N. Li, Synchronization analysis of a class of neural networks with multiple time delays, J. Math-UK., 2021 (2021), 5573619. https://doi.org/10.1155/2021/5573619 doi: 10.1155/2021/5573619
|
| [16] |
M. Hui, N. Yao, H. H. C. Iu, R. Yao, L. Bai, Adaptive synchronization of fractional-order complex-valued neural networks with time-varying delays, IEEE. Access., 10 (2022), 45677–45688. https://doi.org/10.1109/ACCESS.2022.3170091 doi: 10.1109/ACCESS.2022.3170091
|
| [17] |
R. Ye, C. Wang, A. Shu, H. Zhang, Quasi-synchronization and quasi-uniform synchronization of Caputo fractional variable-parameter neural networks with probabilistic time-varying delay, Symmetry., 14 (2022), 1035. https://doi.org/10.3390/sym14051035 doi: 10.3390/sym14051035
|
| [18] |
L. H. Zhao, S. Wen, M. Xu, K. Shi, S. Zhu, T. Huang, PID control for output synchronization of multiple output coupled complex networks, IEEE. T. Netw. Sci. Eng., 9 (2022) 1553–1566. https://doi.org/10.1109/TNSE.2022.3147786 doi: 10.1109/TNSE.2022.3147786
|
| [19] |
L. H. Zhao, S. Wen, C. Li, K. Shi, T. Huang, A recent survey on control for synchronization and passivity of complex networks, IEEE. T. Netw. Sci. Eng., 9 (2022) 4235–4254. https://doi.org/10.1109/TNSE.2022.3196786 doi: 10.1109/TNSE.2022.3196786
|
| [20] |
X. Yang, C. Li, T. Huang, Q. Song, J. Huang, Synchronization of fractional-order memristor-based complex-valued neural networks with uncertain parameters and time delays, Chaos. Soliton. Fract., 110 (2018), 105–123. https://doi.org/10.1016/j.chaos.2018.03.016 doi: 10.1016/j.chaos.2018.03.016
|
| [21] |
C. Wang, Q. Yang, Y. Zhuo, R. Li, Synchronization analysis of a fractional-order non-autonomous neural network with time delay, Physica. A., 549 (2020), 124176. https://doi.org/10.1016/j.physa.2020.124176 doi: 10.1016/j.physa.2020.124176
|
| [22] | I. Pldlubny, Fractional Differential Equations, New York: Academic Press, 1999. |
| [23] | A.A. Kilbas, H. M. Srivastava, J. J. Trujillo, Theory and Applications of Fractional Differential Equations, New York: Elsevier Science Ltd, 2006. |
| [24] | M. A. Duarte-Mermoud, N. Aguila-Camacho, J. A. Gallegos, R. Castro-Linares, Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems, Commun. Nonlinear. Sci., 22 (2015), 650–659. https://doi.org/10.1016/j.cnsns.2014.10.008 |
| [25] |
B. Chen, J. Chen, Razumikhin-type stability theorems for functional fractional-order differential systems and applications, Appl. Math. Comput., 254 (2015) 63–69. https://doi.org/10.1016/j.amc.2014.12.010 doi: 10.1016/j.amc.2014.12.010
|
Figures(16)
Lili Jia, Changyou Wang, Zongxin Lei. Synchronization of nonautonomous neural networks with Caputo derivative and time delay[J]. Networks and Heterogeneous Media, 2023, 18(1): 341-358. doi: 10.3934/nhm.2023013

 DownLoad:
DownLoad:
