




Figure 1.
P-type and PIθ-type schemes.
In this paper, the iterative learning control technique is extended to distributed parameter systems governed by nonlinear fractional diffusion equations. Based on P-type and PIθ-type iterative learning control methods, sufficient conditions for the convergences of systems are given. Finally, numerical examples are presented to illustrate the efficiency of the proposed iterative schemes. The numerical results show that the closed-loop iterative learning control scheme converges faster than the open-loop iterative learning control scheme and the PIθ-type iterative learning control scheme converges faster than the P-type and the PI-type iterative learning control scheme.
Citation: Jungang Wang, Qingyang Si, Jun Bao, Qian Wang. Iterative learning algorithms for boundary tracing problems of nonlinear fractional diffusion equations[J]. Networks and Heterogeneous Media, 2023, 18(3): 1355-1377. doi: 10.3934/nhm.2023059
| [1] | Xavier Litrico, Vincent Fromion, Gérard Scorletti . Robust feedforward boundary control of hyperbolic conservation laws. Networks and Heterogeneous Media, 2007, 2(4): 717-731. doi: 10.3934/nhm.2007.2.717 |
| [2] | Rong Huang, Zhifeng Weng . A numerical method based on barycentric interpolation collocation for nonlinear convection-diffusion optimal control problems. Networks and Heterogeneous Media, 2023, 18(2): 562-580. doi: 10.3934/nhm.2023024 |
| [3] | Didier Georges . Infinite-dimensional nonlinear predictive control design for open-channel hydraulic systems. Networks and Heterogeneous Media, 2009, 4(2): 267-285. doi: 10.3934/nhm.2009.4.267 |
| [4] | Kaïs Ammari, Mohamed Jellouli, Michel Mehrenberger . Feedback stabilization of a coupled string-beam system. Networks and Heterogeneous Media, 2009, 4(1): 19-34. doi: 10.3934/nhm.2009.4.19 |
| [5] | Christophe Prieur . Control of systems of conservation laws with boundary errors. Networks and Heterogeneous Media, 2009, 4(2): 393-407. doi: 10.3934/nhm.2009.4.393 |
| [6] | Gildas Besançon, Didier Georges, Zohra Benayache . Towards nonlinear delay-based control for convection-like distributed systems: The example of water flow control in open channel systems. Networks and Heterogeneous Media, 2009, 4(2): 211-221. doi: 10.3934/nhm.2009.4.211 |
| [7] | Narcisa Apreutesei, Vitaly Volpert . Reaction-diffusion waves with nonlinear boundary conditions. Networks and Heterogeneous Media, 2013, 8(1): 23-35. doi: 10.3934/nhm.2013.8.23 |
| [8] | Ciro D'Apice, Olha P. Kupenko, Rosanna Manzo . On boundary optimal control problem for an arterial system: First-order optimality conditions. Networks and Heterogeneous Media, 2018, 13(4): 585-607. doi: 10.3934/nhm.2018027 |
| [9] | Jésus Ildefonso Díaz, Tommaso Mingazzini, Ángel Manuel Ramos . On the optimal control for a semilinear equation with cost depending on the free boundary. Networks and Heterogeneous Media, 2012, 7(4): 605-615. doi: 10.3934/nhm.2012.7.605 |
| [10] | Avner Friedman . PDE problems arising in mathematical biology. Networks and Heterogeneous Media, 2012, 7(4): 691-703. doi: 10.3934/nhm.2012.7.691 |
In this paper, the iterative learning control technique is extended to distributed parameter systems governed by nonlinear fractional diffusion equations. Based on P-type and PIθ-type iterative learning control methods, sufficient conditions for the convergences of systems are given. Finally, numerical examples are presented to illustrate the efficiency of the proposed iterative schemes. The numerical results show that the closed-loop iterative learning control scheme converges faster than the open-loop iterative learning control scheme and the PIθ-type iterative learning control scheme converges faster than the P-type and the PI-type iterative learning control scheme.
In this paper, we consider boundary tracing problem of nonlinear fractional diffusion equations with Neumann boundary condition
| {Dαtφ=φxx+F(x,t,φ,φx),(x,t)∈ΩT,φx(0,t)=u(t),t∈(0,T],φx(1,t)=g(t),t∈(0,T],φ(x,0)=φ0(x),x∈[0,1] | (1.1) |
by iterative learning algorithms, where Dαt is the Caputo fractional derivative of order α, 0<α<1, (x,t)∈ΩT≜[0,1]×[0,T] and F(x,t,φ,φx) is the nonlinear function.
The basic idea of iterative learning control (ILC) [1,4,16] can be traced back to Garden [8] in 1967 and Uchiyama [28] in 1978. ILC is a control method suitable for dealing with iterative systems, which uses information obtained from previous trial to improve the tracking performance of current trial. Owing to simplicity and effectiveness, ILC plays an important role in many fields and applications [9,10,14].
ILC schemes are widely used for ordinary differential equations (ODEs) [23,25,26,29]. However, there are few studies on its application to partial differential equations (PDEs) and fractional partial differential equations (FPDEs) [11,24]. Choi et al. [3] employed the characteristic line method and the Q-ILC method to study the ILC schemes of a first-order hyperbolic PDE system. Huang et al. [12] studied the P-type ILC scheme for boundary tracking of nonlinear hyperbolic parametric systems and evaluated the robustness of the scheme. Kang et al. [15] proposed a Newton-type ILC algorithm for nonlinear parametric equations and provided sufficient conditions for convergence of the Newton descent method using the λ-norm. Different from the convergence in the sense of the λ norm, Dai et al. [5] derived the P-type ILC for linear parabolic parametric equations and proved its convergence in the sense of the L2-norm and the W1,2-norm. Lan et al. [22] presented a second-order ILC method for a class of multi-agent systems (MAS) with time-delay distributed parameters and proved its convergence.
For the diffusion equation, Xu et al. [30] proposed P-type and D-type ILC methods for infinite-dimensional linear systems in Hilbert spaces. Huang et al. [13] extended ILC to solve the boundary tracking problem of inhomogeneous heat equations and provided evidence for the effectiveness of the D-type ILC scheme. Zhang et al. [32] presented a novel intermittent updating PD-type ILC algorithm for semi-linear distributed parameter systems with sensors or actuators, and provided convergence conditions for the output error. For the fractional diffusion equation, Lan et al. [20] discussed the P-type ILC of fractional order parameter exchange systems and demonstrated that the exchange system maintains traceability over two time periods. Lan et al. [21] proposed a second-order P-type ILC scheme for a class of linear fractional order distributed parameter systems and established a sufficient condition for convergence using λ-norm and generalized Gronwall inequality.
Overall, there have been relatively few studies on iterative learning control algorithms for fractional diffusion equations, which can describe a variety of memory materials and genetic processes [6,18]. Applying the ILC algorithm to fractional diffusion equations can improve control of the system for nonlocal transport phenomena and long-range memory effects, leading to faster convergence and improved tracking accuracy [19]. We aim to extend ILC to the nonlinear fractional diffusion equation and study their convergence. However, this work is challenging, as the difficulty lies in proving the convergence of the iterative learning control algorithm for fractional diffusion equations, with added challenges posed by the fractional derivatives and nonlinear source terms. Therefore, we assume that source term is Lipschitz continuous and employ Sobolev imbedding theorem to overcome difficulties in the proof.
In this paper, we consider boundary tracing problem of one dimensional fractional diffusion equation with input, state and output functions at the k-th iteration,
| {Dαtφk=φkxx+F(x,t,φk,φkx),(x,t)∈ΩT,φkx(0,t)=uk(t),t∈(0,T],φkx(1,t)=g(t),t∈(0,T],φk(x,0)=φ0(x),x∈[0,1],yk(t)=c(t)φk(1,t)+d(t)uk(t), | (1.2) |
where k denotes the iterative number of the process and uk,φk,yk(t) are the input, state and output of the system at the k-th iteration respectively. The main idea is to adjust the control input uk(t) iteratively in order that system output {yk(t)} can track the predefined target yd(t) when k→∞.
In addition, we make some assumptions about the functions in system (1.2). Suppose c(t) and d(t) are bounded and F(x,t,φk,φkx) satisfies Lipschitz condition.
Assumption 1: The functions c(t) and d(t) satisfy
| |c(t)|≤c1,0<d1≤d(t)≤d2, |
where c1,d1,d2 are positive constants.
Assumption 2: The nonlinear function Fk≜F(x,t,φk,φkx) is Lipschitz continuous,
| |Fk+1−Fk|≤CF(|φk+1−φk|+|φk+1x−φkx|), | (1.3) |
where CF is a constant.
This paper is organized as follows. Preliminaries are presented in Section 2. In Section 3, P-type ILC scheme, PIθ-type ILC scheme and corresponding convergence conditions are proposed for the nonlinear system. Numerical examples are given in Section 4 to illustrate the effectiveness of the methods. Finally, conclusions are drawn in Section 5.
To prepare for our subsequent analysis, it is essential to introduce some definitions, useful lemmas and theorems.
Definition 2.1. [17] Let z(t)∈AC[0,T], the Caputo fractional derivative of order α is defined by
| Dαtz(t)=1Γ(1−α)∫t0z′(τ)(t−τ)αdτ,0<α<1,0<t≤T. |
Definition 2.2. [17] Let z(t)∈L(0,T), the Riemann-Liouville fractional integral of order α is defined by
| Iαtz(t)=1Γ(α)∫t0(t−τ)α−1z(τ)dτ,0<α<1,0<t≤T. |
Definition 2.3. [27] The two-parameter Mittag-Leffler function is defined by the series expansion
| Eα,β(z)=∞∑k=0zkΓ(αk+β),α>0,β>0. |
Lemma 2.1. [27] Suppose 0<α<1. Caputo fractional derivative and fractional integral of order α have the following relationship
| Iαt(Dαt(x(t)))=x(t)−x(0). |
Lemma 2.2. [7] Assume x(t) be a differentiable function. The following relationship holds
| 12Dαtx(t)2≤x(t)Dαtx(t),∀α∈(0,1]. |
Lemma 2.3. (Gronwall inequality [31]) Suppose a(t) is a nonnegative, nondecreasing, locally integrable function over 0≤t0≤t≤T and g(t) is a nonnegative, nondecreasing continuous function over 0≤t0≤t≤T, g(t)≤M, where M is a postive constant. If u(t) is nonnegative and locally integrable function over 0≤t0≤t≤T and satisfies
| u(t)≤a(t)+g(t)∫tt0(t−s)α−1u(s)ds,α>0, |
then, we have
| u(t)≤a(t)Eα,1(g(t)Γ(α)tα). |
Theorem 2.1. (Sobolev imbedding theorem [2]) Let Ω∈Rd be a bounded Lipschitz domain and 1≤p≤∞. If 0≤m<k−dp<m+1, the space Wk,p(Ω) is continuously imbedded in Cm,α(¯Ω) for α=k−dp−m and compactly imbedded in Cm,β(¯Ω) for all 0≤β<α.
Remark 2.1. Using the Sobolbev imbedding theorem 2.1 in the case of d = 1, we can get
| maxx∈[0,1]|φ(x,t)|2≤C1||φ(x,t)||2H1, | (2.1) |
where ||φ(x,t)||2H1≜∫Ωφ2+φ2xdx and C1 is a positive constant.
We need to give some necessary lemmas to obtain the convergence conditions for the ILC scheme.
Lemma 3.1. Suppose e(t)∈AC[0,T) and 0.5<θ≤1, then, we have
| |Iθte|2≤Γ(2θ−1)eλtTΓ(θ)2λ2θ−1|e|2λ. | (3.1) |
Proof. From the Definition 2.2 of fractional integral, we can get
| |Iθte|2=1Γ(θ)2(∫t0(t−τ)θ−1e(τ)dτ)2=1Γ(θ)2(∫t0(t−τ)θ−1eλ2τe−λ2τe(τ)dτ)2≤1Γ(θ)2∫t0(t−τ)2θ−2eλτdτ∫t0e2(τ)e−λτdτ≤1Γ(θ)2∫t0(t−τ)2θ−2eλτdτ|e|2λt=eλtΓ(θ)2∫t0(t−τ)2θ−2e−λ(t−τ)dτ|e|2λt. |
where |e|2λ≜supt∈[0,T]{e−λt|e(t)|2,λ>0} and |e(t)| represents absolute value of e(t). Let t−τ=ω and λω=v, we have
| eλtΓ(θ)2∫t0(t−τ)2θ−2e−λ(t−τ)dτ|e|2λt=eλtΓ(θ)2∫t0ω2θ−2e−λωdω|e|2λt=eλtΓ(θ)2∫λt0(vλ)2θ−2e−v1λdv|e|2λt=eλtΓ(θ)2∫λt0v2θ−2e−vdv|e|2λtλ2θ−1. | (3.2) |
From the definition of the Gamma function, we can get
| 1Γ(θ)2∫t0(t−τ)2θ−2eλτdτ|e|2λt≤eλtΓ(θ)2∫∞0v2θ−2e−vdv|e|2λtλ2θ−1=eλtΓ(θ)2Γ(2θ−1)|e|2λtλ2θ−1=Γ(2θ−1)eλtTΓ(θ)2λ2θ−1|e|2λ. | (3.3) |
This completes the proof.
Lemma 3.2. If ψ satisfies the equation
| {Dαtψ=ψxx+δF,(x,t)∈ΩT,ψx(0,t)=e(t),t∈[0,T],ψx(1,t)=0,t∈[0,T],ψ(x,0)=0,x∈[0,1], | (3.4) |
we have
| ||ψ||2L2,λ≤|e|2λλαEα,1((C2F+2CF+1)Tα), | (3.5) |
| ||ψx||2L2,λ≤(|e|2λλα+Mc1λα+C2Fλα||ψ||2L2,λ)Eα,1(C2FTα), | (3.6) |
where
| ||ψ(⋅,t)||2L2,λ≜supt∈[0,T]{e−λt||ψ(⋅,t)||2L2,λ>0}, |
| |e(t)|2λ≜supt∈[0,T]{e−λt|e(t)|2,λ>0}, |
|e(t)| represents absolute value of e(t), M=maxt∈[0,T]|Dαtψ(0,t)|2, c1=αααΓ(α)eα, δF=F(x,t,φk+1,φk+1x)−F(x,t,φk,φkx) and ψ=φk+1−φk.
Proof. (i) We firstly prove the formula (3.5). Multiplying both sides of the equation Dαtψ=ψxx+δF by ψ and integrating with respect to x, it yields
| ∫10ψDαtψdx=∫10ψψxx+ψδFdx. |
Based on Lemma 2.2, formula (1.3) and boundary condition, it is not hard to know
| 12Dαt||ψ||2L2≤−∫10|∇ψ|2dx+∫∂Ωψψxds+CF∫10|ψ|(|ψ|+|ψx|)dx≤−∫10|ψx|2dx+|ψ(0,t)e(t)|+CF||ψ||2L2+CF∫10|ψψx|dx. |
Using Young inequality (weighted form) and taking the positive constant C1 in formula (2.1), it leads to
| Dαt||ψ||2L2≤−2||ψx||2L2+2|ψ(0,t)e(t)|+2CF||ψ||2L2+2CF∫10|ψψx|dx≤−2||ψx||2L2+C1|e(t)|2+1C1|ψ(0,t)|2+2CF||ψ||2L2+||ψx||2L2+C2F||ψ||2L2≤C1|e(t)|2+1C1|ψ(0,t)|2+c2||ψ||2L2−||ψx||2L2, |
where c2=C2F+2CF. It follows from Theorem 2.1 that
| Dαt||ψ||2L2≤C1|e(t)|2+||ψ||2H1+c2||ψ||2L2−||ψx||2L2≤C1|e(t)|2+(c2+1)||ψ||2L2. |
Integrating both sides of the inequality with respect to t, by Lemma 2.1 we have
| ||ψ||2L2≤||ψ(x,0)||2L2+C1Γ(α)∫t0(t−τ)α−1|e(τ)|2dτ+c2+1Γ(α)∫t0(t−τ)α−1||ψ||2L2dτ≤||ψ(x,0)||2L2+C1Γ(α)∫t0(t−τ)α−1eλτdτ|e|2λ+c2+1Γ(α)∫t0(t−τ)α−1||ψ||2L2dτ. |
Using initial condition, we can get
| ||ψ||2L2≤C1Γ(α)∫t0(t−τ)α−1eλτdτ|e|2λ+c2+1Γ(α)∫t0(t−τ)α−1||ψ||2L2dτ. | (3.7) |
Applying Lemma 2.3, we can obtain
| ||ψ||2L2≤C1eλtλα|e|2λEα,1((C2F+2CF+1)Tα). |
Taking λ-norm on both sides of inequality, we can derive
| ||ψ||2L2,λ≤C1λα|e|2λEα,1((C2F+2CF+1)Tα). | (3.8) |
(ii) We then prove the formula (3.6). Multiplying both sides of the equation Dαtψ=ψxx+δF by ψxx and integrating with respect to x, it yields
| ∫10ψxxDαtψdx=||ψxx||2L2+∫10ψxxδFdx. |
By boundary condition, we get
| ∫10ψxDαtψxdx=−e(t)Dαtψ(0,t)−||ψxx||2L2−∫10ψxxδFdx. |
Based on Lemma 2.2, it is not hard to know
| 12Dαt||ψx||2L2≤−e(t)Dαtψ(0,t)−||ψxx||2L2−∫10ψxxδFdx. |
We can conclude from the formula (1.3) that
| 12Dαt||ψx||2L2≤−e(t)Dαtψ(0,t)−||ψxx||2L2+CF∫10|ψxxψ|+|ψxxψx|dx. |
Using Young inequality (weighted form), it leads to
| Dαt||ψx||2L2≤|e(t)|2+|Dαtψ(0,t)|2+C2F(||ψx||2L2+||ψ||2L2)≤|e(t)|2+M+C2F||ψ||2L2+C2F||ψx||2L2, |
where M=maxt∈[0,T]|Dαtψ(0,t)|2. Integrating both sides of the inequality about t and using initial condition, according to Lemma 2.1 we get
| ||ψx||2L2≤||ψx(x,0)||2L2+1Γ(α)∫t0(t−τ)α−1(|e(τ)|2+M+C2F||ψ||2L2)dτ+C2FΓ(α)∫t0(t−τ)α−1||ψx||2L2dτ≤1Γ(α)∫t0(t−τ)α−1eλτdτ|e|2λ+MαΓ(α)tα+C2FΓ(α)∫t0(t−τ)α−1eλτdτ||ψ||2L2,λ+C2FΓ(α)∫t0(t−τ)α−1||ψx||2L2dτ. |
Applying Lemma 2.3, we obtian
| ||ψx||2L2≤(|e|2λeλtλα+MtααΓ(α)+C2Feλtλα||φ||2L2,λ)Eα,1(C2FTα). |
Taking λ-norm on both sides of inequality, we can derive
| ||ψx||2L2e−λt≤(|e|2λλα+Mtαe−λtαΓ(α)+C2Fλα||φ||2L2,λ)Eα,1(C2FTα). |
Since tαe−λt gets the maximum value ααλαeα at t=αλ. Therefore, we can get
| ||ψx||2L2e−λt≤(|e|2λλα+Mc1λα+C2Fλα||ψ||2L2,λ)Eα,1(C2FTα) | (3.9) |
where c1=αααΓ(α)eα. Then, taking the maximum value on the left side of the inequality, we have
| ||ψx||2L2,λ≤(|e|2λλα+Mc1λα+C2Fλα||ψ||2L2,λ)Eα,1(C2FTα). | (3.10) |
This completes the proof.
Lemma 3.3. If ψ satisfies the equation
| {Dαtψ=ψxx+δF,(x,t)∈ΩT,ψx(0,t)=βe(t)+γIθte(t),t∈[0,T],ψx(1,t)=0,t∈[0,T],ψ(x,0)=0,x∈[0,1], | (3.11) |
we have
| ||ψ||2L2,λ≤(2C1β2λα+C1c3λα+2θ−1)|e|2λEα,1((C2F+2CF+1)Tα), |
| ||ψx||2L2,λ≤(2β2λα|e|2λ+Mc1λα+C2Fλα||ψ||2L2,λ+c3|e|2λλα+2θ−1)Eα,1(C2FTα), |
where
| ||ψ(⋅,t)||2L2,λ≜supt∈[0,T]{e−λt||ψ(⋅,t)||2L2,λ>0}, |
| |e(t)|2λ≜supt∈[0,T]{e−λt|e(t)|2,λ>0}, |
|e(t)| represents absolute value of e(t), M=maxt∈[0,T]|Dαtψ(0,t)|2, c1=αααΓ(α)eα, δF=F(x,t,φk+1,φk+1x)−F(x,t,φk,φkx), ψ=φk+1−φk and c3=2Γ(2θ−1)γ2TΓ(θ)2.
Proof. (i) We firstly prove the formula (3.12). Multiplying both sides of the equation Dαtψ=ψxx+δF by ψ and integrating with respect to x, it yields
| ∫10ψDαtψdx=∫10ψψxx+ψδFdx. |
Based on Lemma 2.2 and boundary condition, it is not hard to know
| 12Dαt||ψ||2L2≤−∫10|∇ψ|2dx+ψψx|10+CF∫10|ψ|(|ψ|+|ψx|)dx≤−∫10|ψx|2dx+|ψ(0,t)(βe(t)+γIθte(t))|+CF||ψ||2L2+CF∫10|ψψx|dx. |
Using Young inequality (weighted form) and taking the positive constant C1 in formula (2.1), we obtain
| Dαt||ψ||2L2≤2C1β2|e(t)|2+2C1γ2|Iθte(t)|2+1C1|ψ(0,t)|2+(C2F+2CF)||ψ||2L2−||ψx||2L2. |
Applying Theorem2.1 and Lemma 3.1, it leads to
| Dαt||ψ||2L2≤2C1β2|e(t)|2+2C1γ2|Iθte(t)|2+||ψ||2H1+(C2F+2CF)||ψ||2L2−||ψx||2L2≤2C1β2|e|2+C1c3eλtλ2θ−1|e|2λ+(C2F+2CF+1)||ψ||2L2. |
where c3=2Γ(2θ−1)γ2TΓ(θ)2. Integrating both sides of the inequality about t and using initial condition, by Lemma 2.1 we get
| ||ψ||2L2≤||ψ(x,0)||2L2+2C1β2Γ(α)∫t0(t−τ)α−1|e|2dτ+C1c3eλtλα+2θ−1|e|2λ+C2F+2CF+1Γ(α)∫t0(t−τ)α−1||ψ||2L2dτ≤2C1β2eλtλα|e|2λ+C1c3eλtλα+2θ−1|e|2λ+C2F+2CF+1Γ(α)∫t0(t−τ)α−1||ψ||2L2dτ. |
It follows from Lemma 2.3 that
| ||ψ||2L2≤(2C1β2eλtλα+C1c3eλtλα+2θ−1)|e|2λEα,1((C2F+2CF+1)Tα). |
Taking λ-norm on both sides of inequality, we can derive
| ||ψ||2L2,λ≤(2C1β2λα+C1c3λα+2θ−1)|e|2λEα,1((C2F+2CF+1)Tα). | (3.12) |
(ii) We then prove the formula (3.12). Multiplying both sides of the equation Dαtψ=ψxx+δF by ψxx and integrating with respect to x, it yields
| ∫10ψxxDαtψdx=||ψxx||2L2+∫10ψxxδFdx. |
Based on boundary condition, it is not hard to know
| ∫10ψxDαtψxdx=−(βe(t)+γIθte(t))Dαtψ(0,t)−||ψxx||2L2−∫10ψxxδFdx. |
According to Lemma 2.2, we obtain
| 12Dαt||ψx||2L2≤−(βe(t)+γIθte(t))Dαtψ(0,t)−||ψxx||2L2−∫10ψxxδFdx. |
Applying Lipschitz condition (1.3), we have
| 12Dαt||ψx||2L2≤−(βe(t)+γIθte(t))Dαtψ(0,t)−||ψxx||2L2+CF∫10|ψxxψ|+|ψxxψx|dx. |
Using Young inequality (weighted form), it leads to
| Dαt||ψx||2L2≤2β2|e(t)|2+2γ2|Iθte(t)|2+|Dαtψ(0,t)|2+C2F||ψx||2L2+C2F||ψ||2L2≤2β2|e(t)|2+2γ2|Iθte(t)|2+M+C2F||ψ||2L2+C2F||ψx||2L2. |
Integrating both sides of the inequality with respect to t and using initial condition, by Lemma 2.1 and Lemma 3.1, we get
| ||ψx||2L2≤||ψx(x,0)||2L2+1Γ(α)∫t0(t−τ)α−1(2β2|e|2+M+C2F||ψ||2L2)dτ+C2FΓ(α)∫t0(t−τ)α−1||ψx||2L2dτ+c3eλt|e|2λλα+2θ−1≤2β2Γ(α)∫t0(t−τ)α−1eλτdτ|e|2λ+MαΓ(α)tα+C2FΓ(α)∫t0(t−τ)α−1eλτdτ||ψ||2L2,λ+c3eλt|e|2λλα+2θ−1+C2FΓ(α)∫t0(t−τ)α−1||ψx||2L2dτ≤2β2eλtλα|e|2λ+MαΓ(α)tα+C2Feλtλα||ψ||2L2,λ+C2FΓ(α)∫t0(t−τ)α−1||ψx||2L2dτ+c3eλt|e|2λλα+2θ−1, |
where c3=2Γ(2θ−1)γ2TΓ(θ)2. Using Lemma 2.3, we have
| ||ψx||2L2≤(2β2|e|2λeλtλα+MαΓ(α)tα)Eα,1(C2FTα)+(C2Feλtλα||ψ||2L2,λ+c3eλt|e|2λλα+2θ−1)Eα,1(C2FTα). |
Taking λ-norm on both sides of inequality, similar to Lemma (3.2), we obtain
| ||ψx||2L2,λ≤(2β2λα|e|2λ+Mc1λα+C2Fλα||ψ||2L2,λ+c3|e|2λλα+2θ−1)Eα,1(C2FTα), |
where c1=αααΓ(α)eα. This completes the proof.
The open-loop P-type ILC scheme for Eq (1.2) is
| uk+1(t)=uk(t)+βek(t), | (3.13) |
where ek(t)=yd(t)−yk(t) denotes the output error and the learning gain β is an unknown parameter to be determined later.
Theorem 3.1. For system (1.2) and the open-loop P-type law (3.13), if there exist a learning gain β and a constant l(l>0) satisfying
| (1+l)¯ρ21≤1, | (3.14) |
where ¯ρ1=maxt∈[0,T]|1−βd(t)|, then the output error ek can converge to the ϵ-neighborhood of zero for any constant ϵ>0 in the sense of λ-norm as k→∞.
Proof. From the definition of error, we get
| ek+1(t)=yd(t)−yk+1(t)=yd(t)−yk(t)−(yk+1(t)−yk(t)). | (3.15) |
Based on the formula (3.13), it is not hard to know
| ek+1(t)=ek(t)−c(t)δφk+1(1,t)−βd(t)ek(t)=(1−βd(t))ek(t)−c(t)δφk+1(1,t). | (3.16) |
Squaring both sides of the equation, we get
| |ek+1(t)|2≤¯ρ21|ek(t)|2+¯c2|δφk+1(1,t)|2+2¯ρ1¯c|ek(t)||δφk+1(1,t)|, |
where ¯ρ1=maxt∈[0,T]|1−βd(t)| and ¯c=maxt∈[0,T]|c(t)|. Using Young inequality (weighted form) to ensure (1+l)¯ρ21≤1 and Theorem 2.1, we have
| |ek+1(t)|2≤(1+l)¯ρ21|ek(t)|2+(1+1l)¯c2|δφk+1(1,t)|2≤(1+l)¯ρ21|ek(t)|2+(1+1l)¯c2maxx∈[0,1]|δφk+1(x,t)|2≤(1+l)¯ρ21|ek(t)|2+(1+1l)¯c2C1||δφk+1||2H1. | (3.17) |
Taking λ-norm on both sides of inequality, we get
| |ek+1(t)|2λ≤(1+l)¯ρ21|ek(t)|2λ+(1+1l)¯c2C1||δφk+1||2H1,λ≤(1+l)¯ρ21|ek(t)|2λ+(1+1l)¯c2C1(||δφk+1||2L2,λ+||δφk+1x||2L2,λ). |
Using Lemma 3.2, we obtain
| |ek+1(t)|2λ≤q1|ek(t)|2λ+μ1,k, | (3.18) |
where
| q1=(1+l)¯ρ21+(1+1l)¯c2C1β2(CT+Eα,1(C2FTα)+C2FCTEα,1(C2FTα)1λα)1λα, |
| μ1,k=(1+1l)¯c2C1Eα,1(C2FTα)MkαααΓ(α)eαλα,CT=Eα,1((C2F+2CF+1)Tα) |
and Mk=maxt∈[0,T]|Dαtφk(0,t)|2. Choosing λ large enough so that q1<1, we get
| |ek+1(t)|2λ≤q1(|ek−1(t)|2λ+μ1,k−1)+μ1,k≤qk+11|e0(t)|2λ+qk1μ1,0+qk−11μ1,1+⋯+μ1,k≤qk+11|e0(t)|2λ+¯μ1,k1−q1, | (3.19) |
where ¯μ1,k≜maxm∈{0,1,⋯,k}μ1,m. We select λ large enough so that ¯μ1,k is sufficiently small. Therefore, to ensure |ek+1(t)|2λ≤ϵ2, it is sufficient to make
| qk+11|e0(t)|2λ<ϵ2, | (3.20) |
which means that the output error converges to the ϵ-neighborhood of zero after finite step iteration (k>2(lnϵ−ln|e0|λ)lnq1−1).
Remark 3.1. Due to q1(λ) is a monotonic decreasing function of λ and (1+l)¯ρ21<1, we can see that the inequality q1<1 holds when λ is large enough. From the definition of μ1,k, μ1,k is proportional to λ−α. The number of iterations k is finited, so ¯μ1,k is also proportional to λ−α and ¯μ1,k tends to zero when λ is large enough.
Remark 3.2. In order to satisfy the convergence condition (3.14), the learning gain β should satisfy
| √1+l−1d1√1+l<β<√1+l+1d2√1+l. |
To ensure that the above inequality holds, parameter l should satisfy
| l<(d2+d1d2−d1)2−1. |
The closed-loop P-type ILC control scheme for (1.2) is
| uk+1(t)=uk(t)+βek+1(t), | (3.21) |
where ek+1(t)=yd(t)−yk+1(t) is the output error and the learning gain β is an unknown parameter to be determined later.
Theorem 3.2. For system (1.2) and the ILC law (3.21), if there exist a learning gain β and a constant l(l>0) satisfying
| (1+¯ρ22l)¯ρ22≤1, | (3.22) |
where ¯ρ2=maxt∈[0,T]1|1+βd(t)|, then the output error ek can converge to the ϵ-neighborhood of zero for any constant ϵ>0 in the sense of λ-norm as k→∞.
Proof. From the definition of error, we get
| ek+1(t)=yd(t)−yk+1(t)=yd(t)−yk(t)−(yk+1(t)−yk(t))=ek(t)−c(t)δφk+1(1,t)−βd(t)ek+1(t). | (3.23) |
Based on the formula (3.21), it is not hard to know
| (1+βd(t))ek+1(t)=ek(t)−c(t)δφk+1(1,t). | (3.24) |
Simplifying the above equation, we have
| ek+1(t)=ek(t)(1+βd(t))−c(t)δφk+1(1,t)(1+βd(t)). | (3.25) |
Squaring both sides of the equation, we get
| |ek+1(t)|2≤¯ρ22|ek(t)|2+¯ρ22¯c2|δφk+1(1,t)|2+2¯ρ22¯c|ek(t)||δφk+1(1,t)|, |
where ¯ρ2=maxt∈[0,T]1|1+βd(t)| and ¯c=maxt∈[0,T]|c(t)|. Using Theorem 2.1 and Young inequality (weighted form) to ensure (1+¯ρ22l)¯ρ22<1, we have
| |ek+1(t)|2≤(1+¯ρ22l)¯ρ22|ek(t)|2+(¯ρ22+1l)¯c2|δφk+1(1,t)|2≤(1+¯ρ22l)¯ρ22|ek(t)|2+(¯ρ22+1l)¯c2maxx∈[0,1]|δφk+1(x,t)|2≤(1+¯ρ22l)¯ρ22|ek(t)|2+(¯ρ22+1l)¯c2C1||δφk+1||2H1. |
Taking λ-norm on both sides of inequality, we get
| |ek+1(t)|2λ≤(1+¯ρ22l)¯ρ22|ek(t)|2λ+(¯ρ22+1l)¯c2C1||δφk+1||2H1,λ. |
According to Lemma 3.2, we obtain
| |ek+1(t)|2λ≤(1+¯ρ22l)¯ρ22|ek|2λ+N1|ek+1|2λ+N2,k, | (3.26) |
where
| N1=(¯ρ22+1l)¯c2C1β2(CT+Eα,1(C2FTα)+C2FCTEα,1(C2FTα)1λα)1λα, |
| N2,k=(¯ρ22+1l)¯c2C1Eα,1(C2FTα)MkαααΓ(α)eαλα, |
| CT=Eα,1((C2F+2CF+1)Tα) |
and Mk=maxt∈[0,T]|Dαtφk(0,t)|2. Selecting a sufficiently large λ such that N1<1, we can get
| |ek+1(t)|2λ≤(1+¯ρ22l)¯ρ221−N1|ek|2λ+N2,k1−N1≤q2|ek|2λ+μ2,k, | (3.27) |
where q2=(1+¯ρ22l)¯ρ221−N1 and μ2,k=N2,k1−N1. Using recursion, we get
| |ek+1(t)|2λ≤q2(q2|ek−1(t)|2λ+μ2,k−1)+μ2,k≤qk+12|e0(t)|2λ+qk2μ2,0+qk−12μ2,1+⋯+μ2,k≤qk+12|e0(t)|2λ+¯μ2,k1−q2, | (3.28) |
where ¯μ2,k≜maxm∈{0,1,⋯,k}μ2,m. We select λ large enough such that q2 is less than 1 and ¯μ2,k is sufficiently small. Therefore, to ensure |ek+1(t)|2λ≤ϵ2, it is sufficient to make
| qk+12|e0(t)|2λ<ϵ2, | (3.29) |
which means that the output error converges to the ϵ-neighborhood of zero after finite step iteration (k>2(lnϵ−ln|e0|λ)lnq2−1).
Remark 3.3. In order to satisfy the convergence condition (3.22), the learning gain β should satisfy
| β>√1+l−1d1. |
The open-loop P-type ILC scheme for (1.2) is
| uk+1(t)=uk(t)+βek(t)+γIθek(t),0.5<θ≤1, | (3.30) |
where ek(t)=yd(t)−yk(t) denotes the output error and the learning gain β and γ are unknown parameters to be determined later.
Theorem 3.3. For system (1.2) and the ILC law (3.30), if the learning gain γ is bounded, and there exist the learning gain β and the constant l(l>0) satisfying
| (1+l)¯ρ21≤1, | (3.31) |
where ¯ρ1=maxt∈[0,T]|1−βd(t)|, then the output error ek can converge to the ϵ-neighborhood of zero for any constant ϵ>0 in the sense of λ-norm as k→∞.
Proof. By the definition of error, we have
| ek+1(t)=yd(t)−yk+1(t)=yd(t)−yk(t)−(yk+1(t)−yk(t)). | (3.32) |
Based on the formula (3.30), it is not hard to know
| ek+1(t)=ek(t)−c(t)δφk+1(1,t)−βd(t)ek(t)−γd(t)Iθtek=(1−βd(t))ek(t)−c(t)δφk+1(1,t)−γd(t)Iθtek(t). |
Applying Young inequality (weight form), we get
| |ek+1(t)|2≤(1+l)(1−βd(t))2|ek(t)|2+(2+2l)(c(t)2|δφk+1(1,t)|2+γ2d(t)2|Iθtek|2). |
Using Theorem 2.1, it leads to
| |ek+1(t)|2≤(1+l)¯ρ21|ek(t)|2+(2+2l)(¯c2|δφk+1(1,t)|2+γ2d22|Iθtek|2)≤(1+l)¯ρ21|ek(t)|2+(2+2l)(¯c2maxx∈[0,1]|δφk+1(x,t)|2+γ2d22|Iθtek|2)≤(1+l)¯ρ21|ek(t)|2+(2+2l)(¯c2C1||δφk+1(⋅,t)||2H1+γ2d22|Iθtek|2), |
where ¯ρ1=maxt∈[0,T]|1−βd(t)| and ¯c=maxt∈[0,T]|c(t)|. Using Lemma 3.1, we obtain
| |ek+1(t)|2≤(1+l)¯ρ21|ek(t)|2+(2+2l)(¯c2C1||δφk+1||2H1+d22c3eλtλ2θ−1|ek|2λ), |
where c3=2Γ(2θ−1)γ2TΓ(θ)2. Taking λ-norm on both sides of inequality, we have
| |ek+1(t)|2λ≤((1+l)¯ρ21+(2+2l)d22c3λ2θ−1)|ek(t)|2λ+(2+2l)¯c2C1||δφk+1||2H1,λ. |
According to Lemma 3.3, we get
| |ek+1(t)|2λ≤q3|ek(t)|2λ+μ3,k, | (3.33) |
where
| q3=(1+l)¯ρ21+(2+2l)¯c2C1(CEC1CPCT+CPEα,1(C2FTα))+(2+2l)d22c3λ2θ−1, |
| μ3,k=(2+2l)¯c2C1Eα,1(C2FTα)MkαααΓ(α)eαλα, |
| CT=Eα,1((C2F+2CF+1)Tα), |
| CP=2β2λα+c3λα+2θ−1, |
| CE=1+C2FEα,1(C2FTα)λα |
and
| Mk=maxt∈[0,T]|Dαtφk(0,t)|2. |
Choosing λ large enough such that q3<1, it leads to
| |ek+1(t)|2λ≤q3(q3|ek−1(t)|2λ+μ3,k−1)+μ3,k≤qk+13|e0(t)|2λ+qk3μ3,0+qk−13μ3,1+⋯+μ3,k≤qk+13|e0(t)|2λ+¯μ3,k1−q3, | (3.34) |
where ¯μ3,k≜maxm∈{0,1,⋯,k}μ3,m. We select λ large enough such that q3 is less than 1 and ¯μ3,k is sufficiently small. Therefore, to ensure |ek+1(t)|2λ≤ϵ2, it is sufficient to make
| qk+13|e0(t)|2λ<ϵ2, | (3.35) |
which means that the output error converges to the ϵ-neighborhood of zero after finite step iteration (k>2(lnϵ−ln|e0|λ)lnq3−1).
The closed-loop P-type ILC scheme for (1.2) is
| uk+1(t)=uk(t)+βek+1(t)+γIθek+1(t),0.5<θ≤1, | (3.36) |
where ek(t)=yd(t)−yk(t) denotes the output error and the learning gain β and γ are unknown parameters to be determined later.
Theorem 3.4. For system (1.2) and the ILC law (3.36), if the learning gain γ is bounded, and there exist the learning gain β and the constant l(l>0) satisfying
| (1+¯ρ22l)¯ρ22≤1, | (3.37) |
where ¯ρ2=maxt∈[0,T]1|1+βd(t)|, then the output error ek can converge to the ϵ-neighborhood of zero for any constant ϵ>0 in the sense of λ-norm as k→∞.
Proof. By the definition of error, we have
| ek+1(t)=yd(t)−yk+1(t)=yd(t)−yk(t)−(yk+1(t)−yk(t)). | (3.38) |
Based on the formula (3.36), it is not hard to know
| ek+1(t)=ek(t)−c(t)δφk+1(1,t)−βd(t)ek+1(t)−γd(t)Iθtek+1. |
Combining similar items, it leads to
| (1+βd(t))ek+1(t)=ek(t)−c(t)δφk+1(1,t)−γd(t)Iθtek+1. | (3.39) |
Simplifying the above equation, we have
| ek+1(t)=ek(t)1+βd(t)−c(t)δφk+1(1,t)1+βd(t)−γd(t)1+βd(t)Iθtek+1(t). |
Applysing Young inequality (weighted form), we get
| |ek+1(t)|2≤(1+¯ρ22l)¯ρ22|ek(t)|2+(2¯ρ22+2l)(¯c2|δφk+1(1,t)|2+γ2d22|Iθtek+1(t)|2), |
where ¯ρ2=maxt∈[0,T]1|1+βd(t)| and ¯c=maxt∈[0,T]|c(t)|. Using Theorem 2.1, we obtain
| |ek+1(t)|2≤(1+¯ρ22l)¯ρ22|ek(t)|2+(2¯ρ22+2l)(¯c2maxx∈[0,1]|δφk+1(⋅,t)|2+γ2d22|Iθtek+1|2)≤(1+¯ρ22l)¯ρ22|ek(t)|2+(2¯ρ22+2l)(¯c2C1||δφk+1||2H1+γ2d22|Iθtek+1|2). |
According to Lemma 3.1, we have
| |ek+1(t)|2≤(1+¯ρ22l)¯ρ22|ek(t)|2+(2¯ρ22+2l)(¯c2C1||δφk+1||2H1+d22c3eλt|ek+1|2λλ2θ−1), |
where c3=2Γ(2θ−1)γ2TΓ(θ)2. Taking λ-norm on both sides of inequality, it leads to
| |ek+1(t)|2λ≤(1+¯ρ22l)¯ρ22|ek(t)|2λ+(2¯ρ22+2l)(¯c2C1||δφk+1||2H1,λ+d22c3|ek+1|2λλ2θ−1). |
Using Lemma 3.3, we can get
| |ek+1(t)|2λ≤(1+¯ρ22l)¯ρ22|ek(t)|2λ+N3|ek+1(t)|2λ+N4,k, | (3.40) |
where
| N3=(2¯ρ22+2l)¯c2C1(CEC1CPCT+CPEα,1(C2FTα))+(2¯ρ22+2l)d22c3λ2θ−1, |
| N4,k=(2¯ρ22+2l)¯c2C1Eα,1(C2FTα)MkαααΓ(α)eαλα, |
| CT=Eα,1((C2F+2CF+1)Tα), |
| CP=2β2λα+c3λα+2θ−1, |
CE=1+C2FEα,1(C2FTα)λα and Mk=maxt∈[0,T]|Dαtφk(0,t)|2. Selecting a sufficiently large λ such that q4<1, we can obtain
| |ek+1(t)|2λ≤(1+¯ρ22l)¯ρ221−N3|ek(t)|2λ+N4,k1−N3≤q4|ek(t)|2λ+μ4,k, | (3.41) |
where q4=(1+¯ρ22l)¯ρ221−N3 and μ4,k=N4,k1−N3. Using recursion, we get
| |ek+1(t)|2λ≤q4(q4|ek−1(t)|2λ+μ4,k−1)+μ4,k≤qk+14|e0(t)|2λ+qk4μ4,0+qk−14μ4,1+⋯+μ4,k≤qk+14|e0(t)|2λ+¯μ4,k1−q4, | (3.42) |
where ¯μ4,k≜maxm∈{0,1,⋯,k}μ4,m. We select λ large enough such that q4 is less than 1 and ¯μ4,k is sufficiently small. Therefore, to ensure |ek+1(t)|2λ≤ϵ2, it is sufficient to make
| qk+14|e0(t)|2λ<ϵ2, | (3.43) |
which means that the output error converges to the ϵ-neighborhood of zero after finite step iteration (k>2(lnϵ−ln|e0|λ)lnq4−1).
In this section, we use the following numerical examples to verify convergence conditions of the open-loop P-type ILC, Closed-loop P-type ILC, open-loop PIθ-type ILC and Closed-loop PIθ-type ILC schemes. We can also observe the convergence speed of the four iterative learning algorithms from the numerical results.
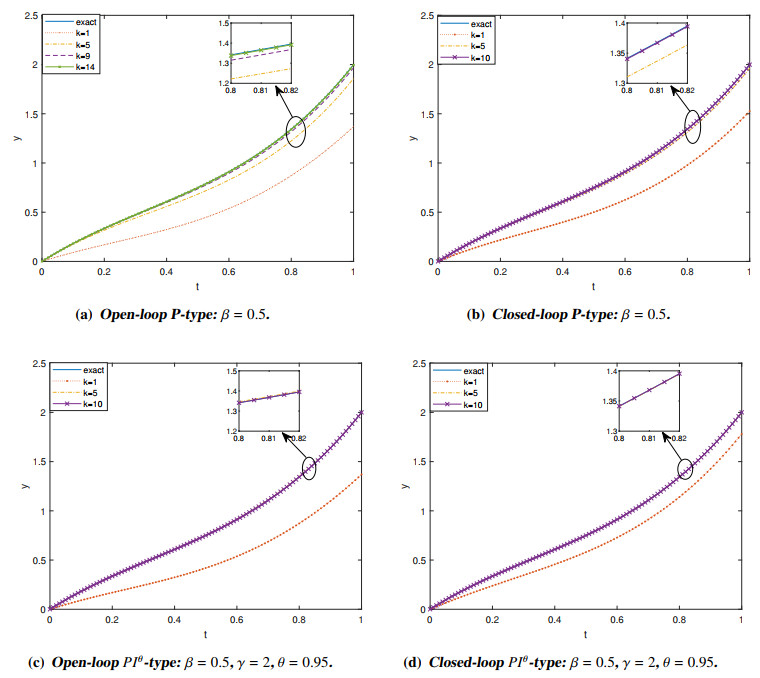
Example 4.1. We consider a boundary tracing problem of one dimensional fractional diffusion equation
| {C0Dαtφk=φkxx+F(x,t,φk),(x,t)∈(0,1)×(0,1],φkx(0,t)=uk(t),t∈[0,1],φkx(1,t)=2t2−3t+2,t∈[0,1],φk(x,0)=x2,x∈[0,1], |
where
| F(x,t,φk)=2x2(t−1)2−α+xt1−α−2(t−1)2−x2(t−1)2−xt−(x2(t−1)2+xt)2+φk+|φk|2, |
α=0.9 and T=1. In this simulation, the output is determined as yk(t)=tφk(1,t)+(t2−t+1)uk(t), that is c(t)=t, d(t)=(t2−t+1). The output reference trajectory is yd(t)=2(t3−t2+t).
Figure 1a displays the tracking performance of the open-loop P-type ILC, while Figure 1b shows the tracking performance of the closed-loop P-type ILC. Additionally, Figure 1c displays the tracking performance of the open-loop PIθ-type ILC, and Figure 1d shows the tracking performance of the closed-loop PIθ-type ILC.
Figure 2 displays the maximum norm of four ILC schemes at different iteration times, including the open-loop P-type, closed-loop P-type, open-loop PIθ-type, and closed-loop PIθ-type ILC schemes. The results demonstrate that the closed-loop-type ILC schemes converge faster than the open-loop-type ILC schemes.
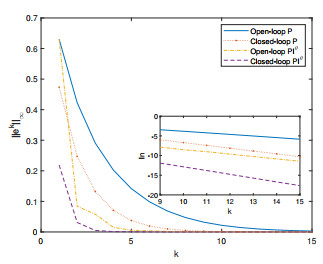
Figure 3a shows the unstable behavior of the open-loop ILC scheme. When β is set to 2, the open-loop P-type ILC scheme fails to meet the convergence conditions. Figure 3b displays that the closed-loop P-type ILC scheme satisfies the convergence conditions and achieves faster convergence speed.
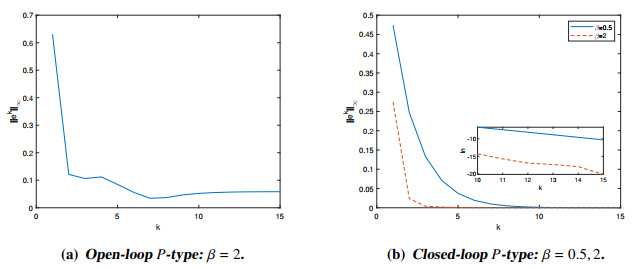
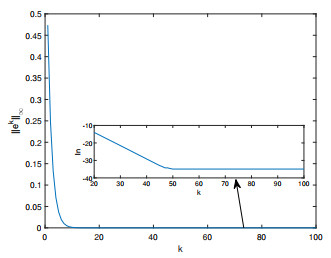
Figure 4 illustrates the convergence behavior of the maximum error ||ek||∞ of the closed-loop P-type ILC scheme over 100 iterations. Although the maximum error does not decrease at iteration k=50, the scheme remains stable and does not diverge.
Tables 1 and 2 respectively provide the maximum error of open-loop PIθ-type and closed-loop PIθ-type schemes. Comparing the data of PIθ-type and P-type schemes in the tables, it can be observed that the PIθ-type ILC scheme converges faster than the P-type ILC scheme. Comparing the data of the PIθ-type (0.5<θ<1) and the PI-type (θ=1) schemes in the tables, it can be observed that the PIθ-type ILC scheme converges faster than the PI-type ILC scheme.
| open-loop P-type | open-loop PIθ-type | |||||
| θ=1 | θ=0.95 | θ=0.7 | θ=0.5 | θ=0.3 | ||
| k=1 | 0.630568931 | 0.630568931 | 0.630568931 | 0.630568931 | 0.630568931 | 0.630568931 |
| k=4 | 0.202638726 | 0.019996924 | 0.015212742 | 0.008726639 | 0.005928183 | 0.010502699 |
| k=7 | 0.068332236 | 0.002482255 | 0.001857693 | 3.6649×10−4 | 9.5086×10−5 | 0.002354680 |
| k=10 | 0.021782898 | 2.8469×10−4 | 1.9983×10−4 | 3.1580×10−5 | 6.5572×10−6 | 7.2370×10−5 |
| k=13 | 0.006572122 | 5.0058×10−5 | 3.5348×10−5 | 3.5879×10−6 | 2.8750×10−7 | 5.7637×10−6 |
| k=15 | 0.002889629 | 1.5586×10−5 | 1.0709×10−5 | 8.4523×10−7 | 3.3754×10−8 | 1.9978×10−7 |
 DownLoad:
CSV
DownLoad:
CSV
| closed-loop P-type | closed-loop PIθ-type | |||||
| θ=1 | θ=0.95 | θ=0.7 | θ=0.5 | θ=0.3 | ||
| k=1 | 0.473649453 | 0.222303282 | 0.218931679 | 0.209854876 | 0.205446586 | 0.199953476 |
| k=3 | 0.132338134 | 0.006667802 | 0.005053414 | 0.001356560 | 0.002265694 | 0.001989692 |
| k=5 | 0.037264451 | 7.3260×10−4 | 4.5345×10−4 | 1.1225×10−4 | 7.2258×10−5 | 8.0773×10−5 |
| k=7 | 0.009879078 | 7.2626×10−5 | 4.9175×10−5 | 4.7746×10−6 | 6.0573×10−6 | 7.3168×10−6 |
| k=9 | 0.002488555 | 1.0026×10−5 | 6.6767×10−6 | 4.7218×10−7 | 5.1262×10−7 | 6.9890×10−7 |
| k=11 | 6.0534×10−4 | 1.5862×10−6 | 1.0129×10−6 | 4.9032×10−7 | 4.9714×10−7 | 4.3887×10−7 |
| k=13 | 1.4366×10−4 | 2.5168×10−7 | 1.4757×10−7 | 3.1214×10−8 | 3.7037×10−8 | 5.1572×10−8 |
| k=15 | 3.3461×10−5 | 3.8956×10−8 | 2.1760×10−8 | 1.2383×10−9 | 5.7806×10−9 | 3.3308×10−9 |
DownLoad:
CSV
In this paper, we investigate iterative learning algorithms for boundary tracking of nonlinear fractional diffusion equation. We provide convergence conditions for open-loop P-type, closed-loop P-type, open-loop PIθ-type and closed-loop PIθ-type ILC algorithms. Numerical results demonstrate the effectiveness and stability of our proposed ILC schemes. Specifically, the closed-loop ILC schemes converge faster than the open-loop ILC schemes, and the PIθ-type ILC scheme outperforms the P-type and PI-type ILC schemes.
This research was supported by National Natural Science Foundation of China (No.11971387) and the fund of Sichuan Gas Turbine Establishment Aero Engine Corporation of China (GJCZ-2020-0018).
The authors declare that there is no conflict of interest.
| [1] |
S. Arimoto, S. Kawamura, F. Miyazaki, Bettering operation of robots by learning, J. Robot. Syst., 1 (1984), 123–140. https://doi.org/10.1002/rob.4620010203 doi: 10.1002/rob.4620010203

|
| [2] | Z. Chen, H. Wu, Selected Topics in Finite Element Methods, Beijing: Science Press, 2010. |
| [3] |
J. Choi, B. Seo, K. Lee, Constrained digital regulation of hyperbolic pde systems: A learning control approach, Korean J. Chem. Eng., 18 (2001), 606–611. https://doi.org/10.1007/BF02706375 doi: 10.1007/BF02706375
|
| [4] |
J. Craig, Adaptive control of manipulators through repeated trials, Am. Control Conf., 21 (1984), 1566–1573. http://dx.doi.org/10.1109/ACC.1984.4171549 doi: 10.1109/ACC.1984.4171549
|
| [5] |
X. Dai, S. Tian, Y. Peng, W. Luo, Closed-loop P-type iterative learning control of uncertain linear distributed parameter systems, IEEE/CAA J. Automatica Sinica, 1 (2014), 267–273. https://doi.org/10.1109/JAS.2014.7004684 doi: 10.1109/JAS.2014.7004684
|
| [6] |
S. Das, I. Pan, S. Das, A. Gupta, Improved model reduction and tuning of fractional-order PIλDμ controllers for analytical rule extraction with genetic programming, ISA Trans., 51 (2012), 237–261. https://doi.org/10.1016/j.isatra.2011.10.004 doi: 10.1016/j.isatra.2011.10.004
|
| [7] |
M. A. Duarte-Mermoud, N. Aguila-Camacho, J. A. Gallegos, R. Castro-Linares, Using general quadratic lyapunov functions to prove lyapunov uniform stability for fractional order systems, Commun. Nonlinear Sci., 22 (2015), 650–659. https://doi.org/10.1016/j.cnsns.2014.10.008 doi: 10.1016/j.cnsns.2014.10.008
|
| [8] | M. Garden, Learning Control of Actuators in Control Systems, Washington, DC: US Patent, 1971. |
| [9] |
K. Hamamoto, T. Sugie, Iterative learning control for robot manipulators using the finite dimensional input subspace, IEEE Trans. Robot. Autom., 18 (2002), 632–635. https://doi.org/10.1109/TRA.2002.801050 doi: 10.1109/TRA.2002.801050
|
| [10] |
Z. Hou, J. Xu, J. Yan, An iterative learning approach for density control of freeway traffic flow via ramp metering, Transp. Res. Part C Emerg. Technol., 16 (2008), 71–97. https://doi.org/10.1016/j.trc.2007.06.007 doi: 10.1016/j.trc.2007.06.007
|
| [11] |
C. Huang, J. Cao, Active control strategy for synchronization and anti-synchronization of a fractional chaotic financial system, Physica A, 473 (2017), 262–275. https://doi.org/10.1016/j.physa.2017.01.009 doi: 10.1016/j.physa.2017.01.009
|
| [12] |
D. Huang, X. Li, W. He, S. Zhang, Iterative learning control for boundary tracking of uncertain nonlinear wave equations, J. Franklin Inst., 355 (2018), 8441–8461. https://doi.org/10.1016/j.jfranklin.2018.10.004 doi: 10.1016/j.jfranklin.2018.10.004
|
| [13] |
D. Huang, J. Xu, X. Li, C. Xu, M. Yu, D-type anticipatory iterative learning control for a class of inhomogeneous heat equations, Automatica, 49 (2013), 2397–2408. https://doi.org/10.1016/j.automatica.2013.05.005 doi: 10.1016/j.automatica.2013.05.005
|
| [14] |
X. Jin, Adaptive iterative learning control for high-order nonlinear multi-agent systems consensus tracking, Syst. Control Lett., 89 (2016), 16–23. https://doi.org/10.1016/j.sysconle.2015.12.009 doi: 10.1016/j.sysconle.2015.12.009
|
| [15] | J. Kang, A newton-type iterative learning algorithm of output tracking control for uncertain nonlinear distributed parameter systems, in Proceedings of the 33rd Chinese Control Conference, IEEE, Nanjing, (2014), 8901–8905. https://doi.org/10.1109/ChiCC.2014.6896498 |
| [16] | S. Kawamura, Iterative learning control for robotic systems, Proc. IECON'84, (1984), 393–398. |
| [17] | A. A. Kilbas, H. M. Srivastava, J. J. Trujillo, Theory and Applications of Fractional Differential Equations, USA: Elsevier, 204 (2006), 540. |
| [18] | H. Kinateder, N. F. Wagner, Multiple-period market risk prediction under long memory: When var is higher than expected, J. Risk Finance, 15 (2014), 4–32. |
| [19] |
Y. H. Lan, W. Bin, Y. Zhou, Iterative learning consensus control with initial state learning for fractional order distributed parameter models multi-agent systems, Math. Methods Appl. Sci., 45 (2022), 5–20. https://doi.org/10.1002/mma.7589 doi: 10.1002/mma.7589
|
| [20] | Y. Lan, L. Lin, J. Xia, P-type iterative learning control for a class of fractional order distributed parameter switched systems, in 2018 37th Chinese Control Conference (CCC), IEEE, Wuhan, (2018), 2836–2841. https://doi.org/10.23919/ChiCC.2018.8483310 |
| [21] |
Y. H. Lan, L. Liu, Y. P. Luo, Iterative learning control for a class of fractional order distributed parameter systems, Asian J. Control, 22 (2020), 449–459. https://doi.org/10.1002/asjc.1908 doi: 10.1002/asjc.1908
|
| [22] |
Y. Lan, B. Wu, Y. Shi, Y. Luo, Iterative learning based consensus control for distributed parameter multi-agent systems with time-delay, Neurocomputing, 357 (2019), 77–85. https://doi.org/10.1016/j.neucom.2019.04.064 doi: 10.1016/j.neucom.2019.04.064
|
| [23] |
S. Liu, J. Wang, W. Wei, A study on iterative learning control for impulsive differential equations, Commun. Nonlinear Sci. Numer. Simul., 24 (2015), 4–10. https://doi.org/10.1016/j.cnsns.2014.12.002 doi: 10.1016/j.cnsns.2014.12.002
|
| [24] |
D. Luo, J. Wang, D. Shen, Learning formation control for fractional-order multiagent systems, Math. Methods Appl. Sci., 41 (2018), 5003–5014. https://doi.org/10.1002/mma.4948 doi: 10.1002/mma.4948
|
| [25] |
D. Luo, J. Wang, D. Shen, PDα‐type distributed learning control for nonlinear fractional‐order multiagent systems, Math. Methods Appl. Sci., 42 (2019), 4543–4553. https://doi.org/10.1002/mma.5677 doi: 10.1002/mma.5677
|
| [26] |
F. Memon, C. Shao, An optimal approach to online tuning method for pid type iterative learning control, Int. J. Control Autom. Syst., 18 (2020), 1926–1935. https://doi.org/10.1007/s12555-018-0840-0 doi: 10.1007/s12555-018-0840-0
|
| [27] | I. Podlubny, Fractional Differential Equations, Mathematics in Science and Engineering, New York: Academic press, 1999. |
| [28] |
M. Uchiyama, Formation of high-speed motion pattern of a mechanical arm by trial, Trans. Soc. Instrum. Control Eng., 14 (1978), 706–712. https://doi.org/10.9746/sicetr1965.14.706 doi: 10.9746/sicetr1965.14.706
|
| [29] |
X. Wang, J. Wang, D. Shen, Y. Zhou, Convergence analysis for iterative learning control of conformable fractional differential equations, Math. Methods Appl. Sci., 41 (2018), 8315–8328. https://doi.org/10.1002/mma.5291 doi: 10.1002/mma.5291
|
| [30] | C. Xu, R. Arastoo, E. Schuster, On iterative learning control of parabolic distributed parameter systems, in 2009 17th Mediterranean Conference on Control and Automation, IEEE, Thessaloniki, Greece, (2017), 510–515. https://doi.org/10.1109/MED.2009.5164593 |
| [31] |
H. Ye, J. Gao, Y. Ding, A generalized gronwall inequality and its application to a fractional differential equation, J. Math. Anal. Appl., 328 (2007), 1075–1081. https://doi.org/10.1016/j.jmaa.2006.05.061 doi: 10.1016/j.jmaa.2006.05.061
|
| [32] |
J. Zhang, B. Cui, Z. Jiang, J. Chen, A pd-type iterative learning algorithm for semi-linear distributed parameter systems with sensors/actuators, IEEE Access 7 (2019), 159037–159047. https://doi.org/10.1109/ACCESS.2019.2950456 doi: 10.1109/ACCESS.2019.2950456
|
| 1. | Yuangao Yan, Xixian Tan, Yunshan Wei, 2024, Chapter 39, 978-981-97-4395-7, 419, 10.1007/978-981-97-4396-4_39 |
Figures(4) / Tables(2)
Jungang Wang, Qingyang Si, Jun Bao, Qian Wang. Iterative learning algorithms for boundary tracing problems of nonlinear fractional diffusion equations[J]. Networks and Heterogeneous Media, 2023, 18(3): 1355-1377. doi: 10.3934/nhm.2023059

| open-loop P-type | open-loop PIθ-type | |||||
| θ=1 | θ=0.95 | θ=0.7 | θ=0.5 | θ=0.3 | ||
| k=1 | 0.630568931 | 0.630568931 | 0.630568931 | 0.630568931 | 0.630568931 | 0.630568931 |
| k=4 | 0.202638726 | 0.019996924 | 0.015212742 | 0.008726639 | 0.005928183 | 0.010502699 |
| k=7 | 0.068332236 | 0.002482255 | 0.001857693 | 3.6649×10−4 | 9.5086×10−5 | 0.002354680 |
| k=10 | 0.021782898 | 2.8469×10−4 | 1.9983×10−4 | 3.1580×10−5 | 6.5572×10−6 | 7.2370×10−5 |
| k=13 | 0.006572122 | 5.0058×10−5 | 3.5348×10−5 | 3.5879×10−6 | 2.8750×10−7 | 5.7637×10−6 |
| k=15 | 0.002889629 | 1.5586×10−5 | 1.0709×10−5 | 8.4523×10−7 | 3.3754×10−8 | 1.9978×10−7 |
DownLoad:
CSV
| closed-loop P-type | closed-loop PIθ-type | |||||
| θ=1 | θ=0.95 | θ=0.7 | θ=0.5 | θ=0.3 | ||
| k=1 | 0.473649453 | 0.222303282 | 0.218931679 | 0.209854876 | 0.205446586 | 0.199953476 |
| k=3 | 0.132338134 | 0.006667802 | 0.005053414 | 0.001356560 | 0.002265694 | 0.001989692 |
| k=5 | 0.037264451 | 7.3260×10−4 | 4.5345×10−4 | 1.1225×10−4 | 7.2258×10−5 | 8.0773×10−5 |
| k=7 | 0.009879078 | 7.2626×10−5 | 4.9175×10−5 | 4.7746×10−6 | 6.0573×10−6 | 7.3168×10−6 |
| k=9 | 0.002488555 | 1.0026×10−5 | 6.6767×10−6 | 4.7218×10−7 | 5.1262×10−7 | 6.9890×10−7 |
| k=11 | 6.0534×10−4 | 1.5862×10−6 | 1.0129×10−6 | 4.9032×10−7 | 4.9714×10−7 | 4.3887×10−7 |
| k=13 | 1.4366×10−4 | 2.5168×10−7 | 1.4757×10−7 | 3.1214×10−8 | 3.7037×10−8 | 5.1572×10−8 |
| k=15 | 3.3461×10−5 | 3.8956×10−8 | 2.1760×10−8 | 1.2383×10−9 | 5.7806×10−9 | 3.3308×10−9 |
DownLoad:
CSV
| open-loop P-type | open-loop PIθ-type | |||||
| θ=1 | θ=0.95 | θ=0.7 | θ=0.5 | θ=0.3 | ||
| k=1 | 0.630568931 | 0.630568931 | 0.630568931 | 0.630568931 | 0.630568931 | 0.630568931 |
| k=4 | 0.202638726 | 0.019996924 | 0.015212742 | 0.008726639 | 0.005928183 | 0.010502699 |
| k=7 | 0.068332236 | 0.002482255 | 0.001857693 | 3.6649×10−4 | 9.5086×10−5 | 0.002354680 |
| k=10 | 0.021782898 | 2.8469×10−4 | 1.9983×10−4 | 3.1580×10−5 | 6.5572×10−6 | 7.2370×10−5 |
| k=13 | 0.006572122 | 5.0058×10−5 | 3.5348×10−5 | 3.5879×10−6 | 2.8750×10−7 | 5.7637×10−6 |
| k=15 | 0.002889629 | 1.5586×10−5 | 1.0709×10−5 | 8.4523×10−7 | 3.3754×10−8 | 1.9978×10−7 |
| closed-loop P-type | closed-loop PIθ-type | |||||
| θ=1 | θ=0.95 | θ=0.7 | θ=0.5 | θ=0.3 | ||
| k=1 | 0.473649453 | 0.222303282 | 0.218931679 | 0.209854876 | 0.205446586 | 0.199953476 |
| k=3 | 0.132338134 | 0.006667802 | 0.005053414 | 0.001356560 | 0.002265694 | 0.001989692 |
| k=5 | 0.037264451 | 7.3260×10−4 | 4.5345×10−4 | 1.1225×10−4 | 7.2258×10−5 | 8.0773×10−5 |
| k=7 | 0.009879078 | 7.2626×10−5 | 4.9175×10−5 | 4.7746×10−6 | 6.0573×10−6 | 7.3168×10−6 |
| k=9 | 0.002488555 | 1.0026×10−5 | 6.6767×10−6 | 4.7218×10−7 | 5.1262×10−7 | 6.9890×10−7 |
| k=11 | 6.0534×10−4 | 1.5862×10−6 | 1.0129×10−6 | 4.9032×10−7 | 4.9714×10−7 | 4.3887×10−7 |
| k=13 | 1.4366×10−4 | 2.5168×10−7 | 1.4757×10−7 | 3.1214×10−8 | 3.7037×10−8 | 5.1572×10−8 |
| k=15 | 3.3461×10−5 | 3.8956×10−8 | 2.1760×10−8 | 1.2383×10−9 | 5.7806×10−9 | 3.3308×10−9 |
